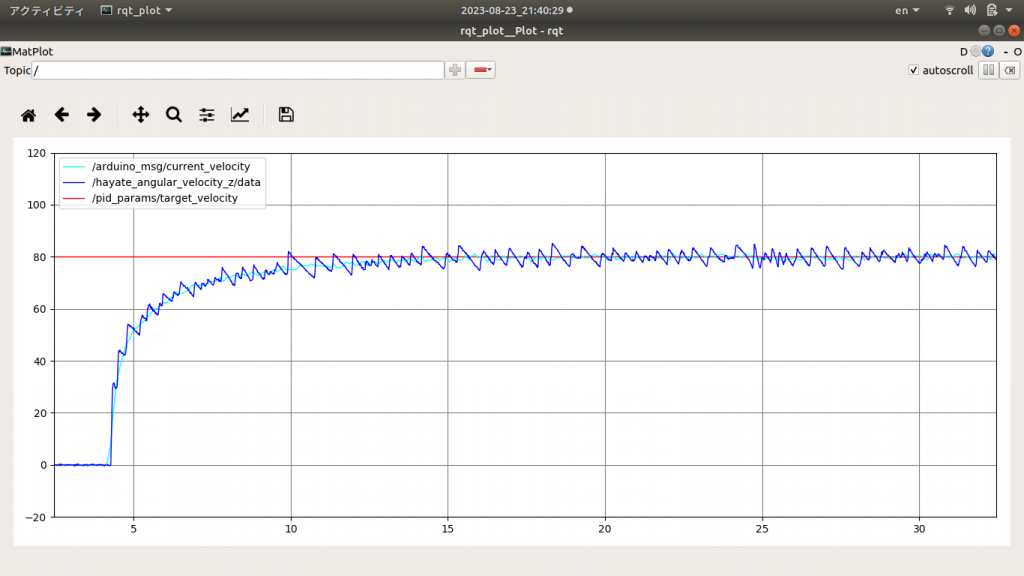
前の画像次の画像 PID制御の目標値、エンコーダによる回転速度、hayate_imu測った回転速度曲線 PID制御の目標値、エンコーダによる回転速度、hayate_imu測った回転速度曲線 PID制御の目標値、エンコーダによる回転速度、hayate_imu測った回転速度曲線 ロボット・ドローン部品お探しなら