概要
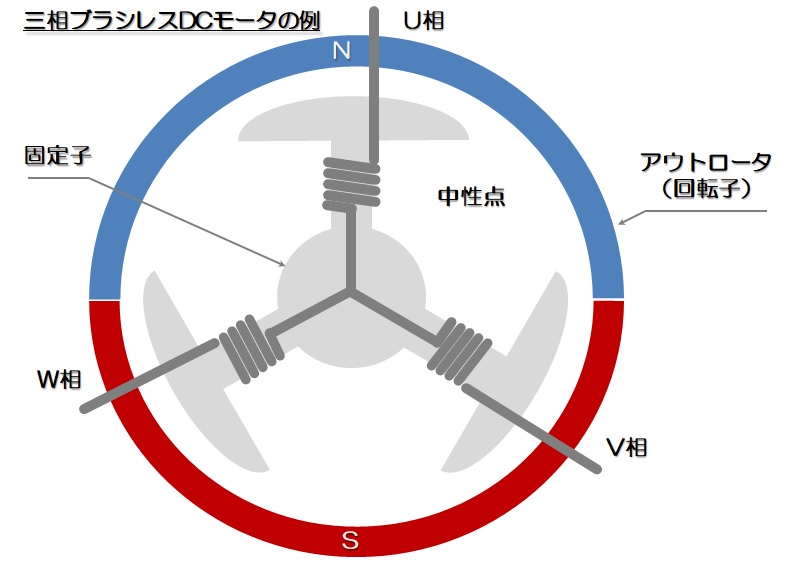
DCブラシレスモータはブラシや整流子に依存しなくなり、代わりに整流用の半導体デバイスを使用する。同期モータの一種で、特性はDCモータと同様。速度はモータ電圧に比例し、トルクはモータ電流に比例する。下図のように、回転部としてのロータは外側にある、アウターロータ型モータと呼ばれるのを例に説明してみる。回転子の内周には磁石が配置されており、U、V、W相コイルの位置は120°ずれている。三相コイルは中心(中性点)で互いに接続されている。U、V、W相コイルの外側にホールセンサが配置され、出力信号はプルアップされて制御プロセッサに入力される。アウターロータ(回転子、磁石)のN極がホールセンサに近いときはH、S極がホールセンサに近いときはLとなる。
Hブリッジ回路でモータ制御
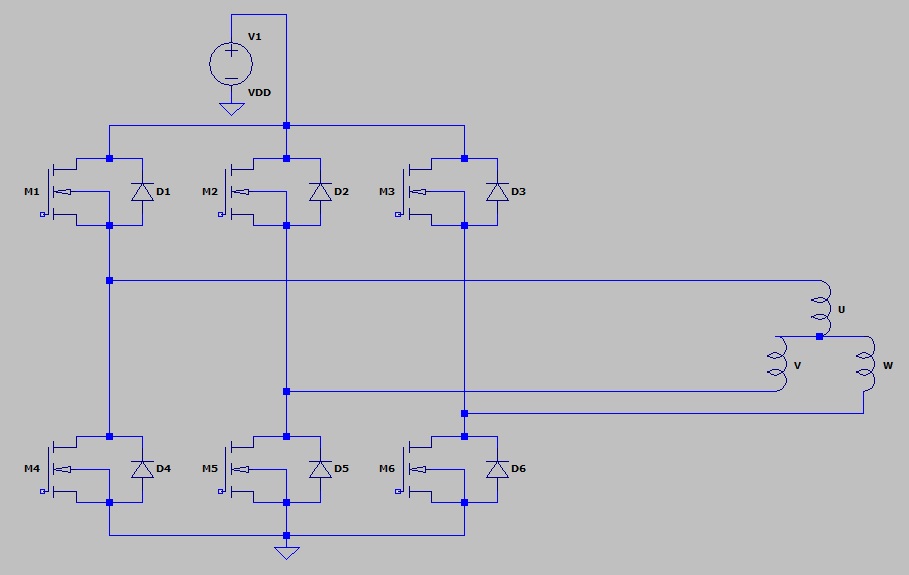
ブラシレスDCモータを駆動するHブリッジ回路の一例は下図のように示される。
下図のように、120°矩形波のU、V、W相ホールセンサと、U、V、W相電圧のH、Lの対応関係が分かる。
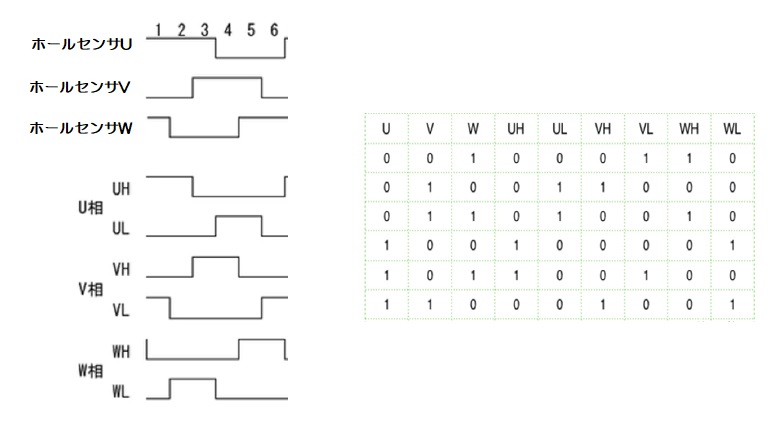
よって、アウターロータが一周360°回転の場合、U、V、W相ホールセンサのUH、UL、VH、VL、WH、WLがそれぞれ180°、U、V、W相電圧のUH、UL、VH、VL、WH、WLがそれぞれ120°と分かる。
ブラシレスDCモータには、FOC(ベクトル周波数変換、磁界ベクトル方向制御とも呼ばれる)、方形波制御(台形波制御、120°制御、6ステップ整流制御とも呼ばれる)、正弦波制御の3つの主な制御方法がある。
矩形波制御
矩形波制御は、ホールセンサまたは無誘導推定アルゴリズムを使用してモータの回転子の位置を取得し、360°の電気サイクルで回転子の位置に応じて6回の転流(60°の転流ごと)を実行する。各転流位置モータは特定の方向に力を出力するので、矩形波制御の位置精度は電気的に60°であると言える。この制御では、モータの相電流波形は方形波に近いため、矩形波制御と呼ばれている。
正弦波制御
正弦波制御方式はSVPWM波を使用し、出力は三相正弦波電圧であり、対応する電流も正弦波電流。矩形波制御と比較してトルク変動が少なく、高調波が少なく、制御時の「細かい」感じが明らかだが、制御器の性能要件は矩形波制御よりわずかに高く、モータ効率が発揮できない。
FOC制御
正弦波制御は、電圧ベクトルの制御を実現し、間接的に電流の大きさの制御を実現するが、電流の方向を制御することはできない。 FOC制御は、電流ベクトルの制御、すなわちモータの固定子磁界のベクトル制御を実現する正弦波制御の改良版と見なすことができる。
ロボット・ドローン部品お探しなら![]()