概況
テスト用サンプルを作成することで、品質かねてコストの面から海外PCB生産を試してみたいと思ったので、旧正月休まず営業と宣伝していたAllpcb(Jiepei、捷配)に依頼した。今回はPCBのみならず、試しに部品調達、実装も頼むことにした。
ミッション
PCBサイズ5cm x 5cm+、かつMOQが5枚+のハードルから、PCB 5枚大きいサイズPCB 5枚(6cm x 6cm)、小さいサイズPCB 20枚(3cm x 3cm)、面付2枚x2枚、つまり大きいサイズPCBに小さいサイズPCBが4枚入るので、大PCB 5枚=小PCB 20枚と注文した。また、小さいサイズPCB 4枚に部品調達に実装も依頼した。Allpcbが一旦図面、部品調達確認を終えたものの、のち、Allpcb営業から面付のVスロット加工は8cm x 8cm+にしないとできないと、Vスロットの代わりに、0.5mmの穴開けをすると提案した。Allpcb営業曰く回路と外観に影響なしと言い切ったので、今回限り見栄えを犠牲するかもしれないことを覚悟してGo aheadと穴あけ提案を承認した。
これまでの流れ
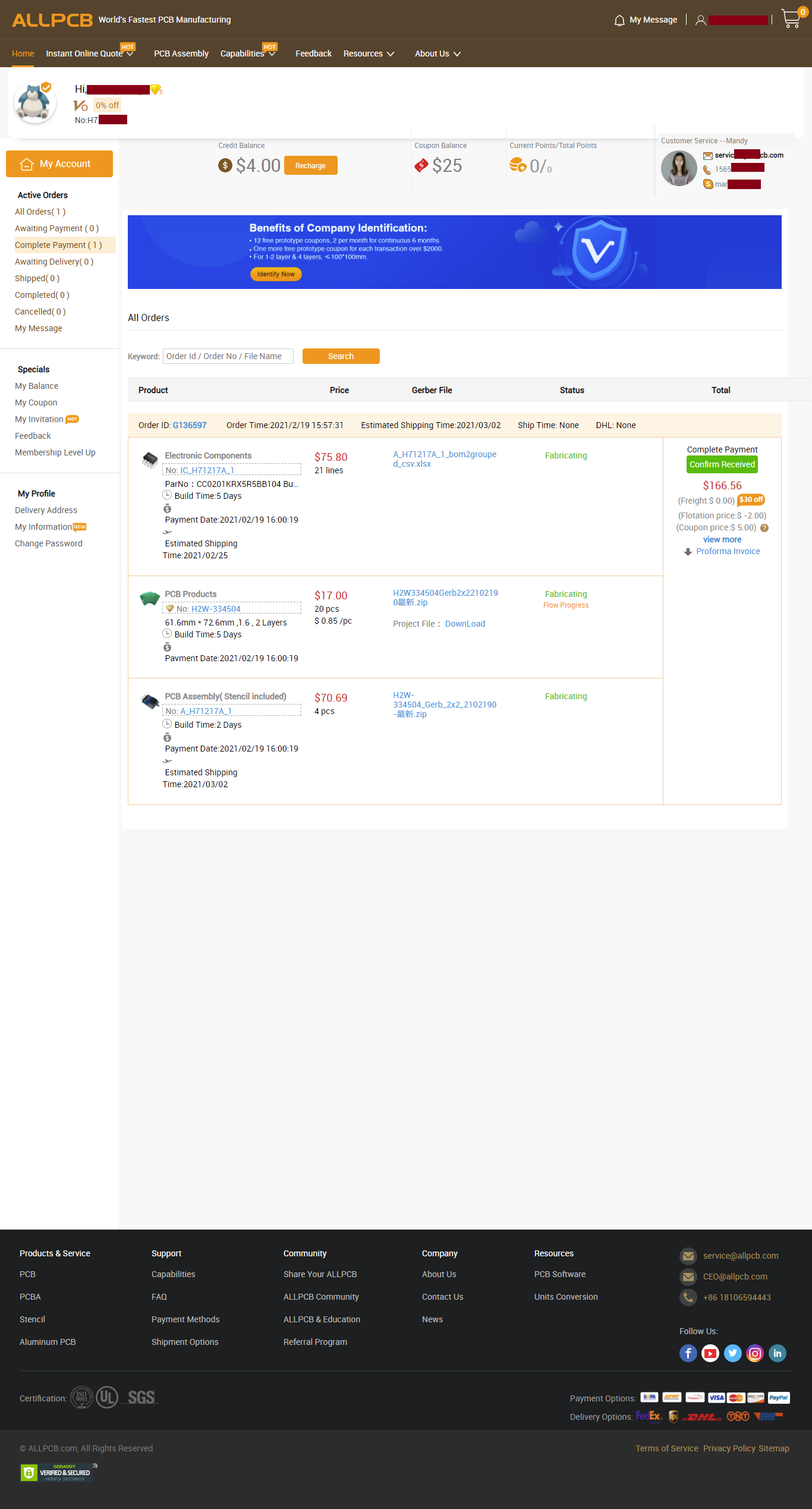
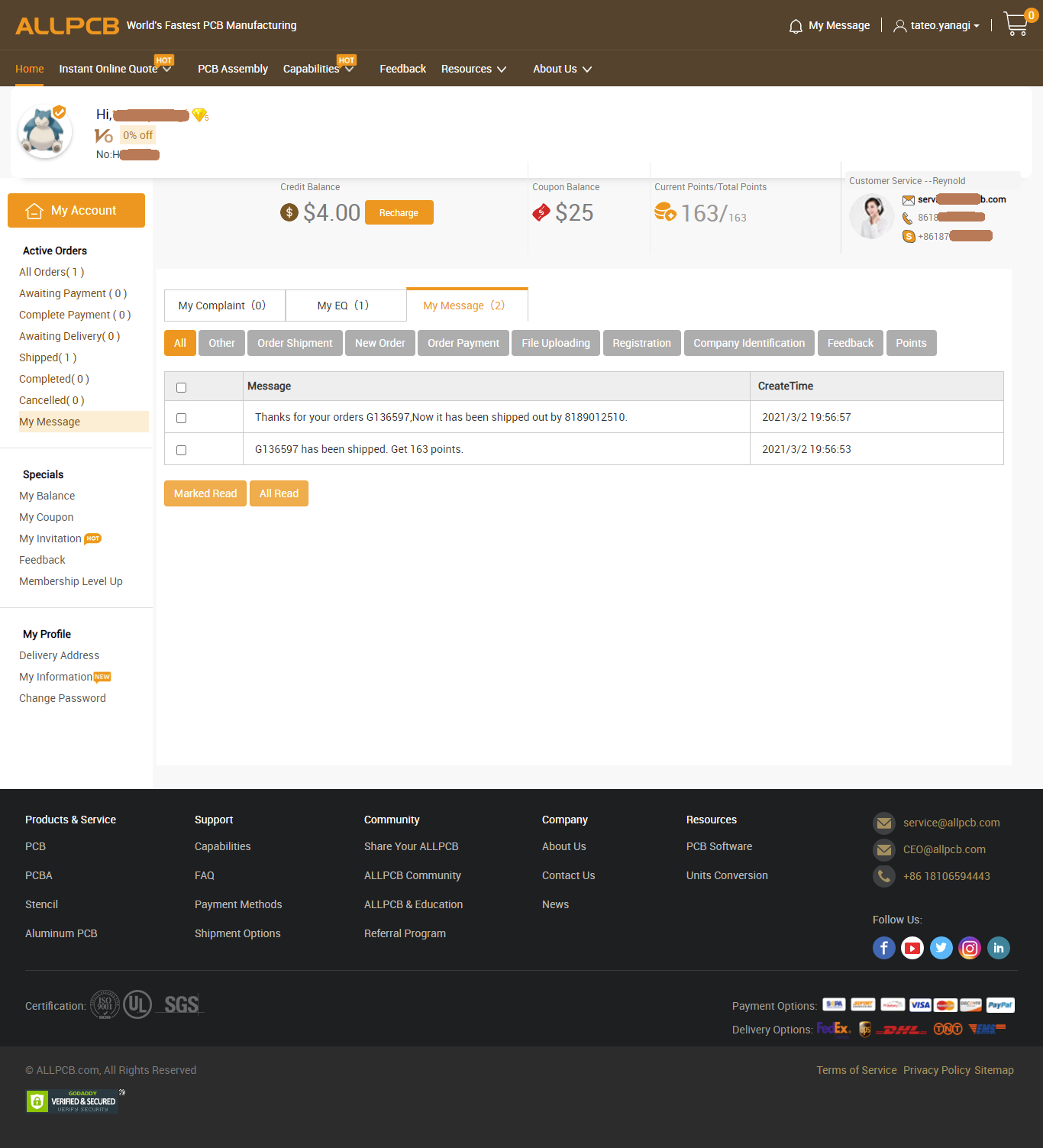
2月10日にAllpcb営業にWEBメッセージを送って、ユーザ登録を済ませてGerb&BOMファイルをUpload、2月12日旧正月を挟んで、2月19日にAllpcb営業が確認完了、3月2日までに作成完了と伝えて、2月19日にクレジットでお支払いを済ませて、いよいよ生産をスタートさせることに。これで、旧正月を挟んだとはいえ、ほとんど毎日メッセージかメールの往来で生産に必要な図面確認してもらって9日間もかかった。料金は、166.56USDと表示して、実際の支払い+5USD(3%)、カード会社の手数料だろうか。DHL送料は28USDとの見積もりで、クーポン30USDで免除となった。残りのクーポン2USDが破棄か行方不明。
PCBA工程
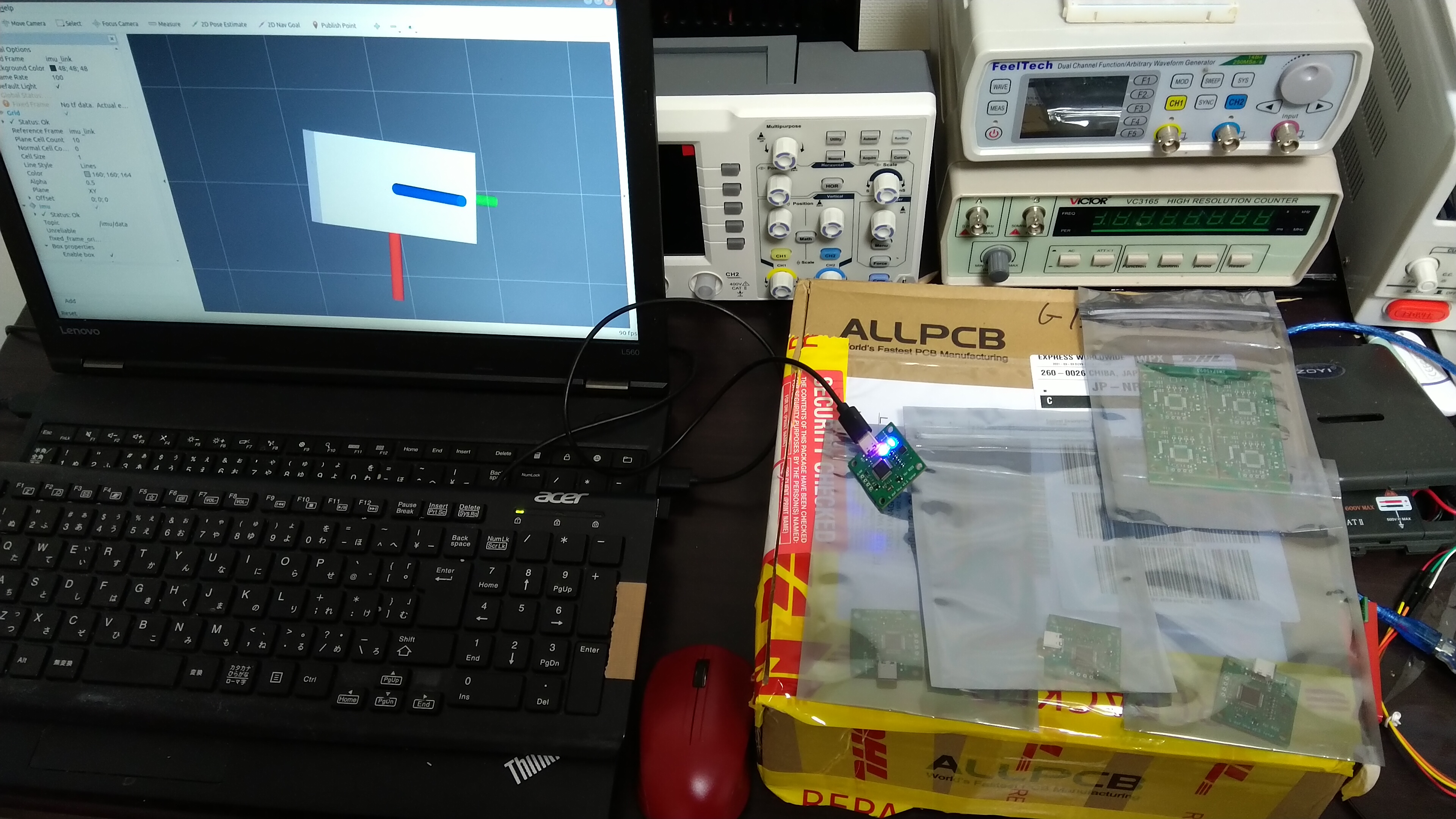
Allpcb営業が作成したスケジュールは上記添付画像のとおり。
Parts
5日(2月19日~2月25日)、冗長分含む部品代75.80USD。すべての部品の数がPCB図面必要数以上に調達したようで、生産時のムダが発生した際に必要だそうだ。最後余った分を完成品とともに必ず送るように要望した。
PCB
5日(2月19日~2月25日)、製造費用17.00USD。
SMT
2日(2月26日?~2月27日?)、実装費用70.69USD、開始、完成時間がよく分からない。
オーダー~届くまで
今回PCBA生産依頼したものが届くまでの進捗を以下のとおり記録しておくので、ご参考にしてください。
・2月10日(水) 見積依頼、注文オーダー、2月12日(金)旧正月、2月15日(月)旧正月連休明け
→2月19日(金) やっとAllpcb技術が確認完了、2月25日にPCB完了、3月2日に発送の予定が知らせたので、支払い済ませた
→2月25日(木) PCB予定完了日、完了せず、Allpcbに連絡して返事なし
→2月26日(金) 返事なし
→2月27日(土) 再度連絡、2月25日にPCB完了予定だったが、完了せず、部品到着済み、SMT未着手と返事くれた。予定日3月2日の出荷に間に合うか、遅れるならいつ送るか不安、やっと19時19分にPCB Packing完了
→2月28日(日) PCBAに入ったらしい、予定の3月2日出荷に間に合いそう
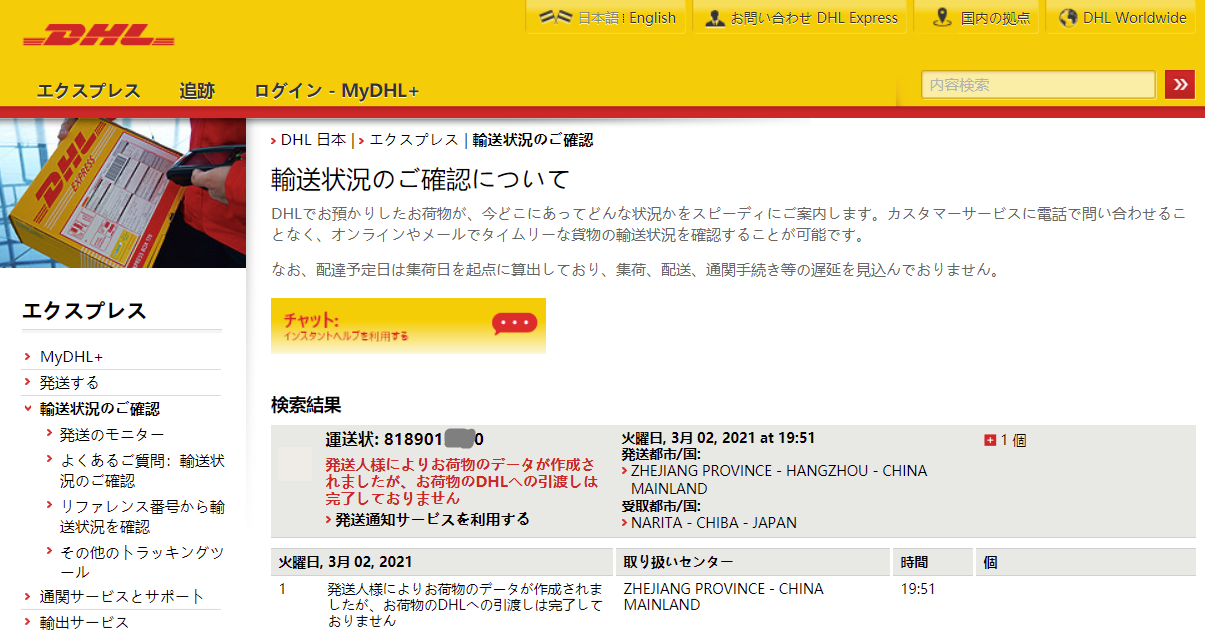
→3月2日(火) Allpcb営業に本日出荷可能かと確かめると、本日出荷できない、いつ出荷するかわからないと返事してくれた。予定日出荷不能のことを事前予告なし、いきなり出荷しないとの事態になった。再度遅延の理由を聞いたところ、注文が立て込んで生産が追い付かない状況?との回答だった。予定とおりに出荷するようと要望して工場が調整した結果、日暮れ時今夜DHL発送可能との回答あった。
→3月3日(水) DHL画面で荷物を検索したところ、Allpcbが荷物データを作成したが、DHLへの引渡しは完了してないと。やはり宣言通りに3月2日(火)に出荷できなかった。クレームを出して早く出荷するよう求めた。13時すぎDHL集荷した。
→3月5日(金) DHL配達予定日。
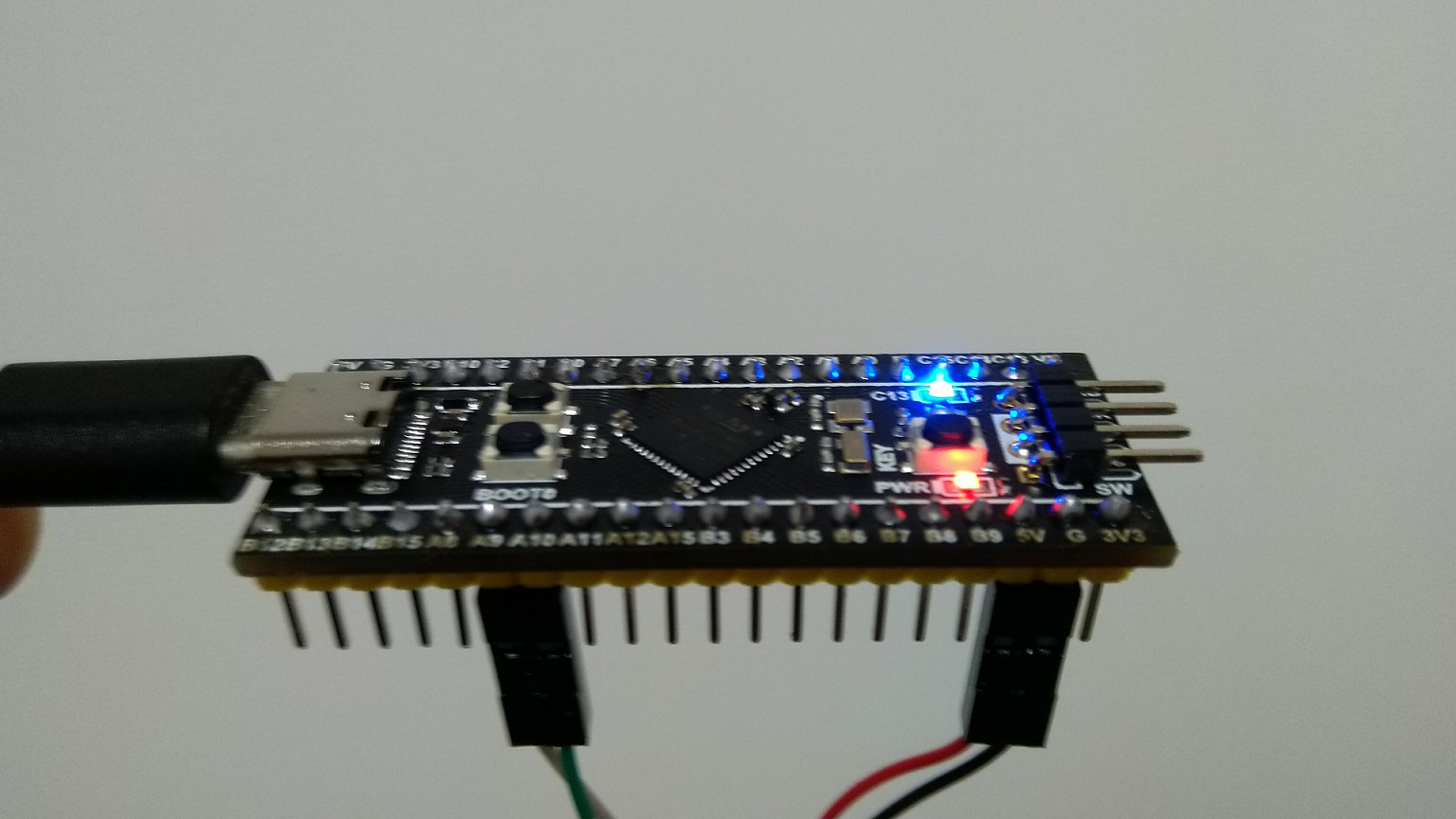
→3月6日(土) 予定日より1日遅れて、届いた。関税&DHL通関手数料→1900円、制作総額→およそ2万円。早速PCBA=4枚、動作確認していずれも設計通りに動いたので主な目標が達成したとの判断。ステンシルの添付を忘れたみたいなので、別途送付するようと要望した。
→3月8日(月) Allpcb営業はステンシルが工場の判断で破棄したと返事、おかしいと感じた。情報セキュリティへ不安が残る。
結び
注文~届くまでほぼ1ヶ月経った。品質に不安があったが、幸いに動作確認済みなので、今回の制作が目標達成とした。反省として、PCBAよりPCBを発注したほうが良いことが分かった。また海外配送のほうがDHLでも3~4日かかるので、早く作りたいのであれば、国内へ発注したほうが良い。なお、Allpcbの場合、本社と営業は杭州市におき、工場は安徽省のどこかにあるか、外注したためか、キャッチフレーズに書いたように「世界最速生産」は、残念ながら実力を見せられなかった。PCBAの場合、部品が揃わないと長い時間かかるため、国内へ発注か、部品を調達して自社で実装したほうが良いだろう。良いところとしては、価格と、営業は平日、休日にも関わらず連絡すると返事してくれた。日本製含む部品の価格は、中国現地で調達したほうが圧倒的に安い。もちろん正規ルートから購入するのが前提。恐らくほとんどの部品は東南アジアで製造されて、まして大量購買による単価の引き下げが当然なことだ。ステンシルを送ったらお客がSMTを頼まないとか、送料はお客が払うから高いほうを選ぶとか考え方がおかしい、嘘やんと思われた時に大人の辛抱が必要でまだ進化の余地が多々あると感じさせられた。この経験を生かして、これからは評判のよいJLCPCBに発注することに。
関連記事
ロボット・ドローン部品お探しなら![]()