想定用途
地下パイプ、住宅床下、橋梁桁下など社会インフラの狭い空間(狭所)での点検ロボットとして
主な仕様
機械
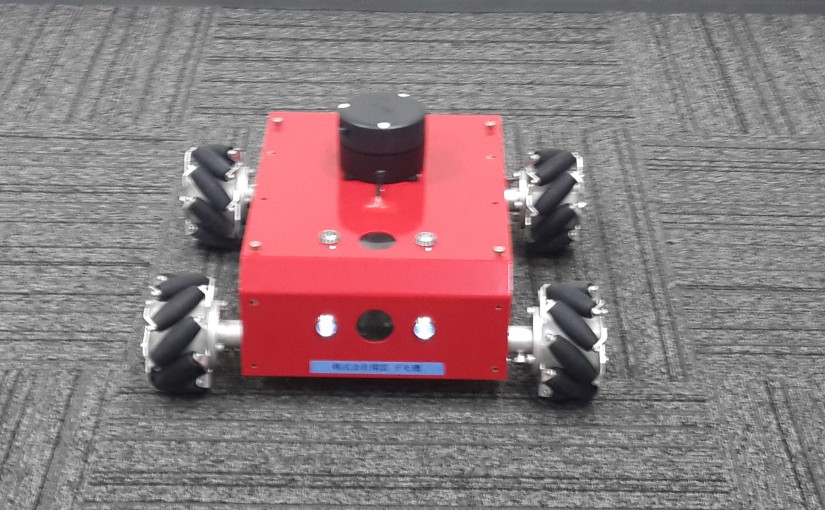
・寸法 37.3x35x18.3cm(突起物含む)
・4WD四駆、メカナム車輪x4
・速度 約20 cm/秒(直線)・0.8 rad/秒(回転)
・斜面角度 約20 度
・ロボット中心回転半径 0 m
・環境温度 0 ~ 35℃ 非防水
電気
・使用時間 6時間(使用環境により、本体のみ、端末除き)
・充電時間 8時間(ACアダプタ)
・2.4GHz Wifi (出力100mw)
・slam lidar(探知距離8m)
機能
・android端末(OS5.0以上)遠隔制御
・動画中継・4K静止画撮影(動画 640x480pix、静止画 3280x2464pix)
・静止・マニュアル運転中、地図作成・表示・管理
・目的地指定・表示
・経路自動作成・表示
・経路自動作成・目的地へ自動運転
・障害物自主回避(360度2D平面slam lidar使用)
・android端末からマニュアル運転制御・自動運転に介入可能
・ROS対応
※ 場合により上記仕様調整の可能性あり
※ 2WD三輪・四輪、オムニホイル、100m長距離レーザセンサ、筐体カスタマイズ対応可能。
主な仕様

動画
点検自律走行ロボットREDの手動操縦編
点検自律走行ロボットREDのHector法地図作成編
点検自律走行ロボットREDのHector法自律走行編
販売サイト
以上
ロボット・ドローン部品お探しなら![]()