micro-ROS
micro-ROS puts ROS 2 onto Micro-controllers = マイコン版のROS2と言って良い。これまで高性能SOCボードやPCをターゲットにするしかなかったROSは、一気に組み込みシステムまで広がりそうになる。stm32cubemx_utilsはSTM32CubeMX/IDEプロジェクトにとってmicro-ROSを容易に実装することを目的とするROSパッケージとなる。それでは、STM32CubeIDEプロジェクトでstm32cubemx_utilsを使ってmicro-ROSを、STM32ファミリーのミドル級マイコンSTM32F4に組み込む手順を確かめてみよう。
確認環境
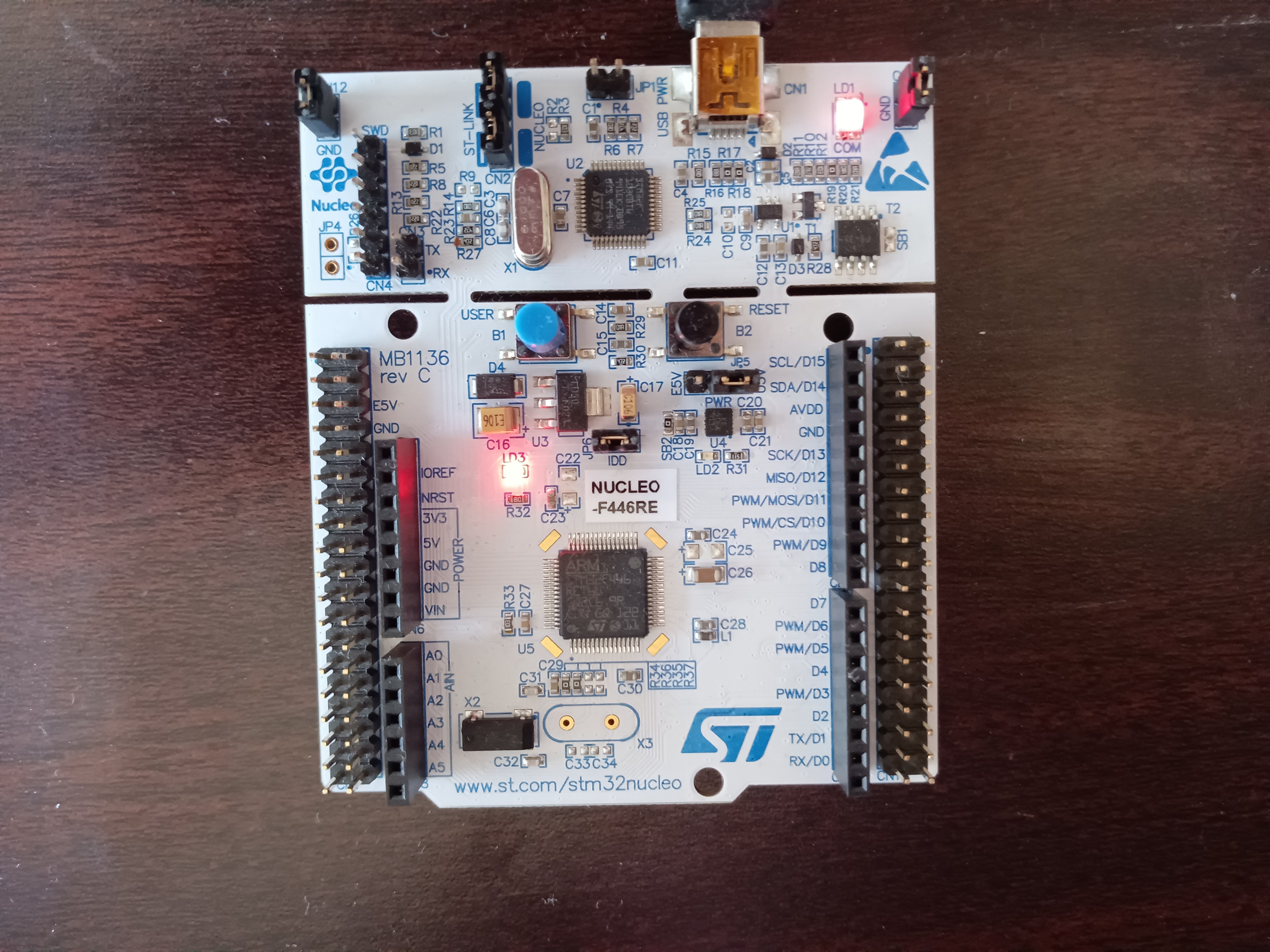
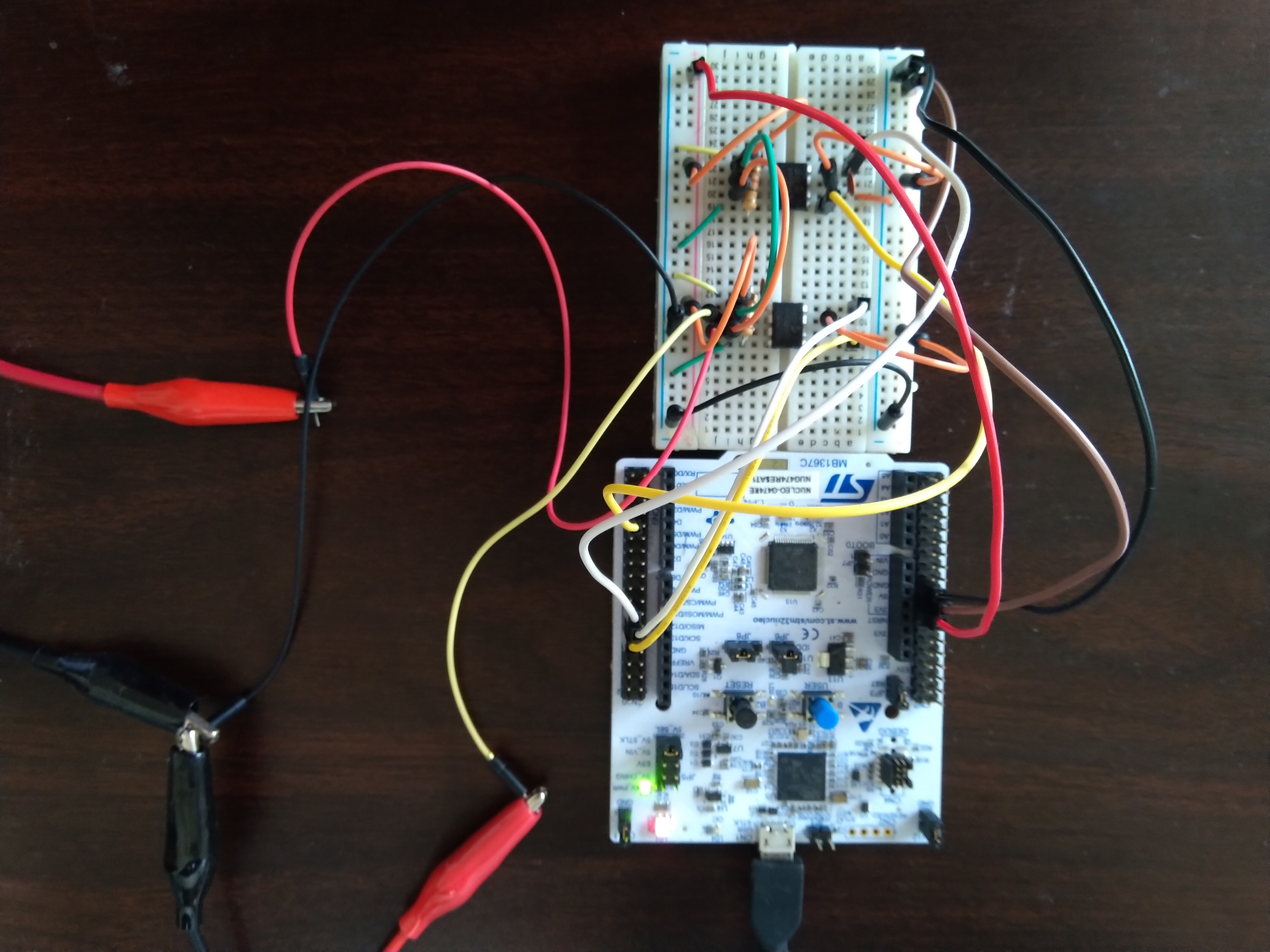
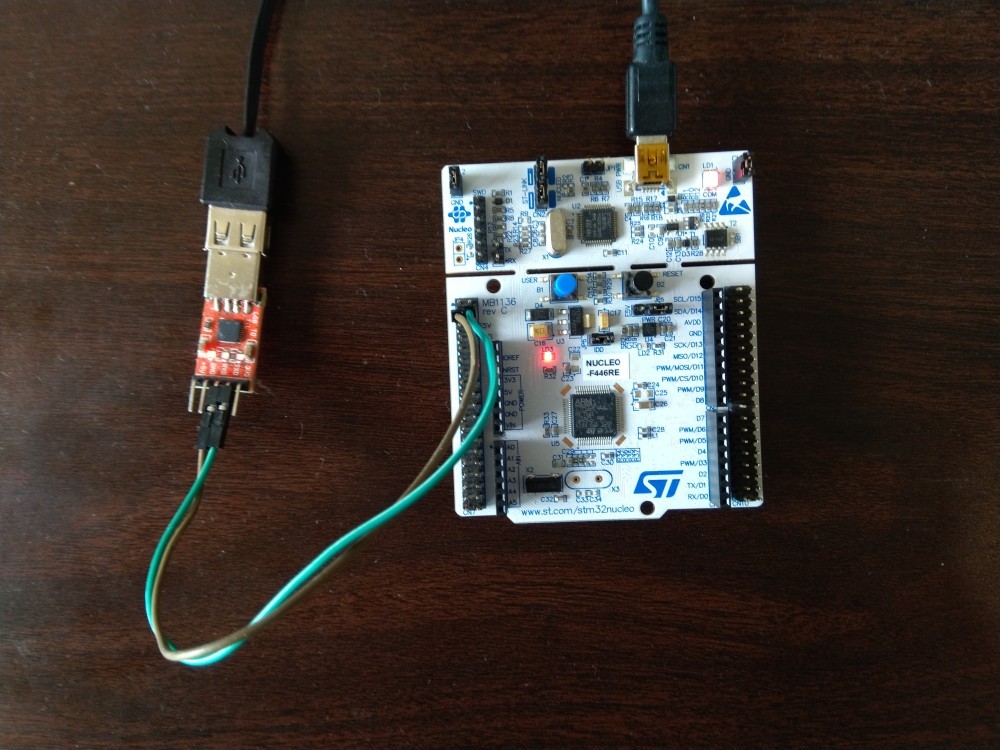
・micro-ROS側 NUCLEO-F446RE(MB1136)、本文のターゲットボードとなる
・ROS2側 ROS2(humble) & STM32CubeIDE 1.12.0インストール済み@UBUNTU 22.04
・接続 micro-ROS側とROS2(humble)側と、通信用シリアルケーブル(UASRT TX/RX TTL-USBコンバータ付)で接続済み、別途NUCLEO-F446REへオンボードデバッガーよりUSB給電&プログラム書き込み
実装手順
以下Dockerインストール→プロジェクト作成→utils入手(humble)→ハードウェア設定→ソース手入れ→agent作成→接続確認の順で説明していく。
Dockerインストール
sudo apt-get update sudo apt-get install ca-certificates curl gnupg lsb-release sudo mkdir -p /etc/apt/keyrings curl -fsSL https://download.docker.com/linux/ubuntu/gpg | sudo gpg --dearmor -o /etc/apt/keyrings/docker.gpg echo "deb [arch=$(dpkg --print-architecture) signed-by=/etc/apt/keyrings/docker.gpg] https://download.docker.com/linux/ubuntu $(lsb_release -cs) stable" | sudo tee /etc/apt/sources.list.d/docker.list > /dev/null sudo apt-get update sudo apt-get install docker-ce=5:24.0.1-1~ubuntu.22.04~jammy docker-ce-cli=5:24.0.1-1~ubuntu.22.04~jammy containerd.io docker-compose-plugin sudo groupadd docker sudo usermod -aG docker $USER sudo chmod 666 /var/run/docker.sock
stm32プロジェクト作成
STM32CubeIDEでプロジェクトを作成しておく。
stm32cubemx_utilsクローン
上記プロジェクトフォルダの直下にmicro_ros_stm32cubemx_utilsを、Cloneしておく。
git clone -b $ROS_DISTRO https://github.com/micro-ROS/micro_ros_stm32cubemx_utils
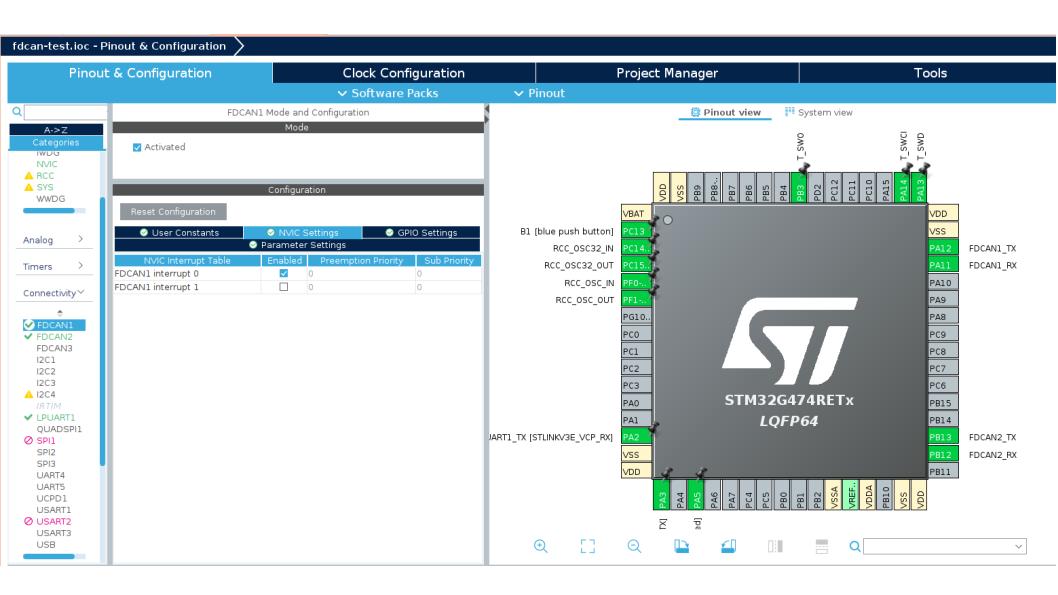
STM32CubeIDE設定
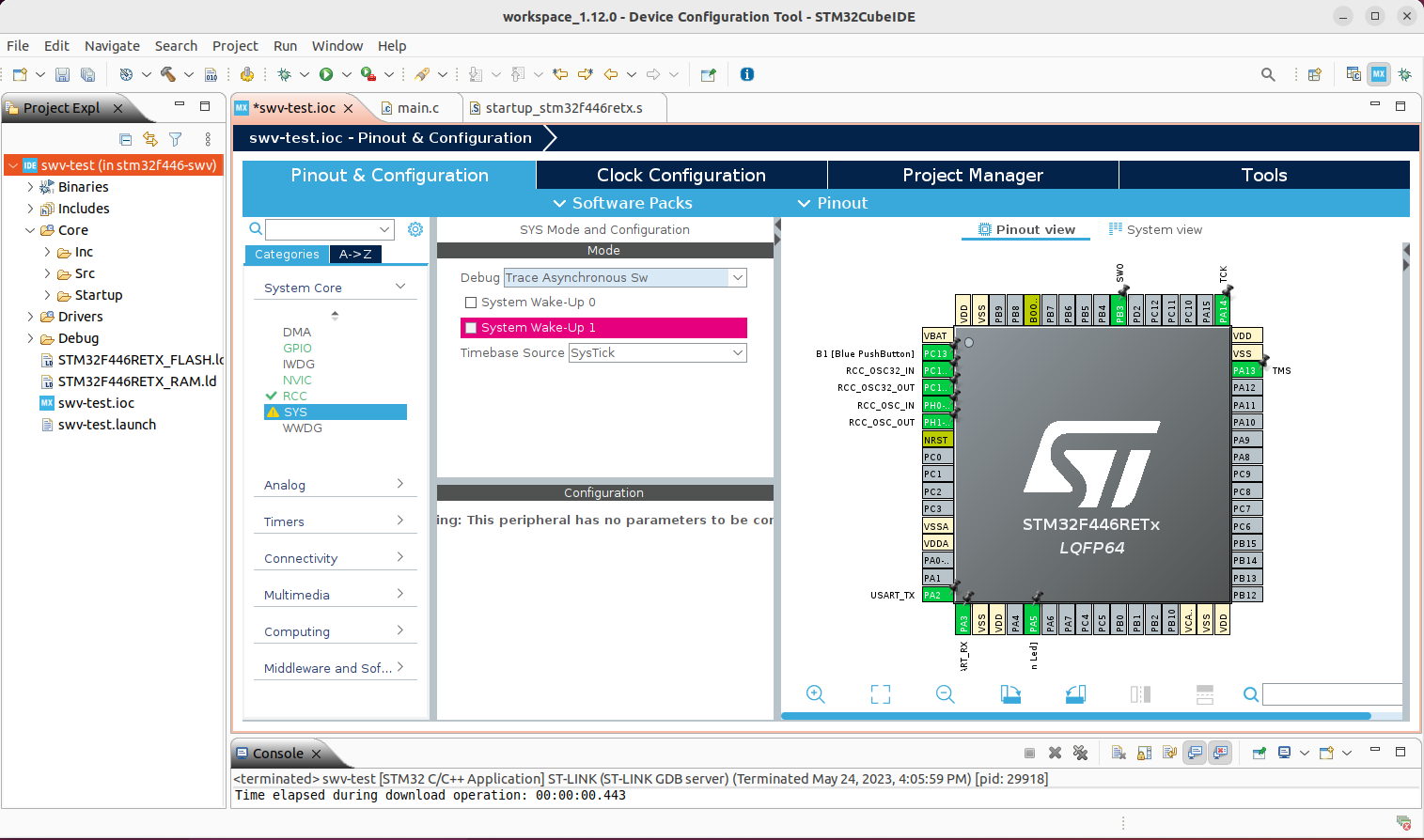
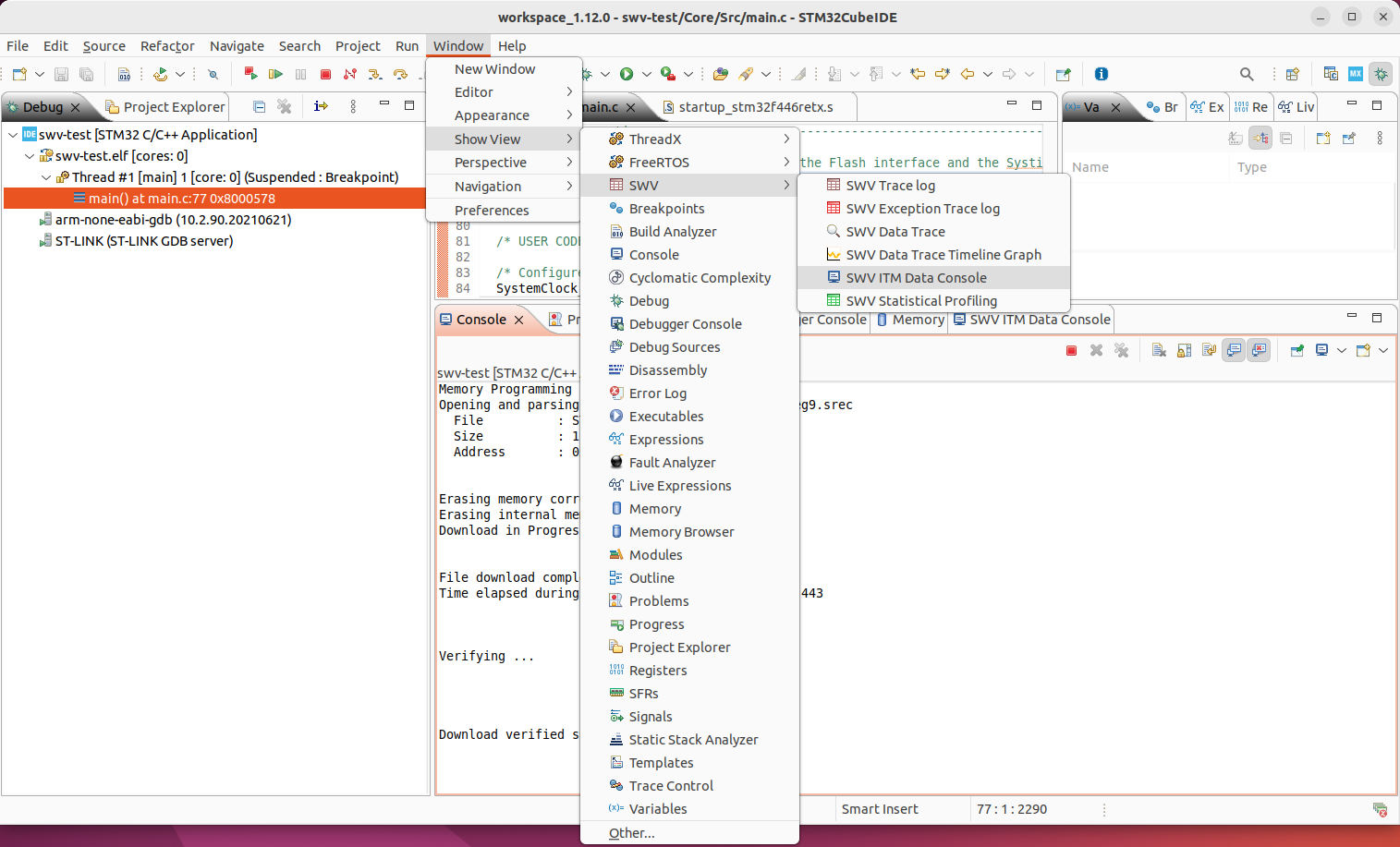
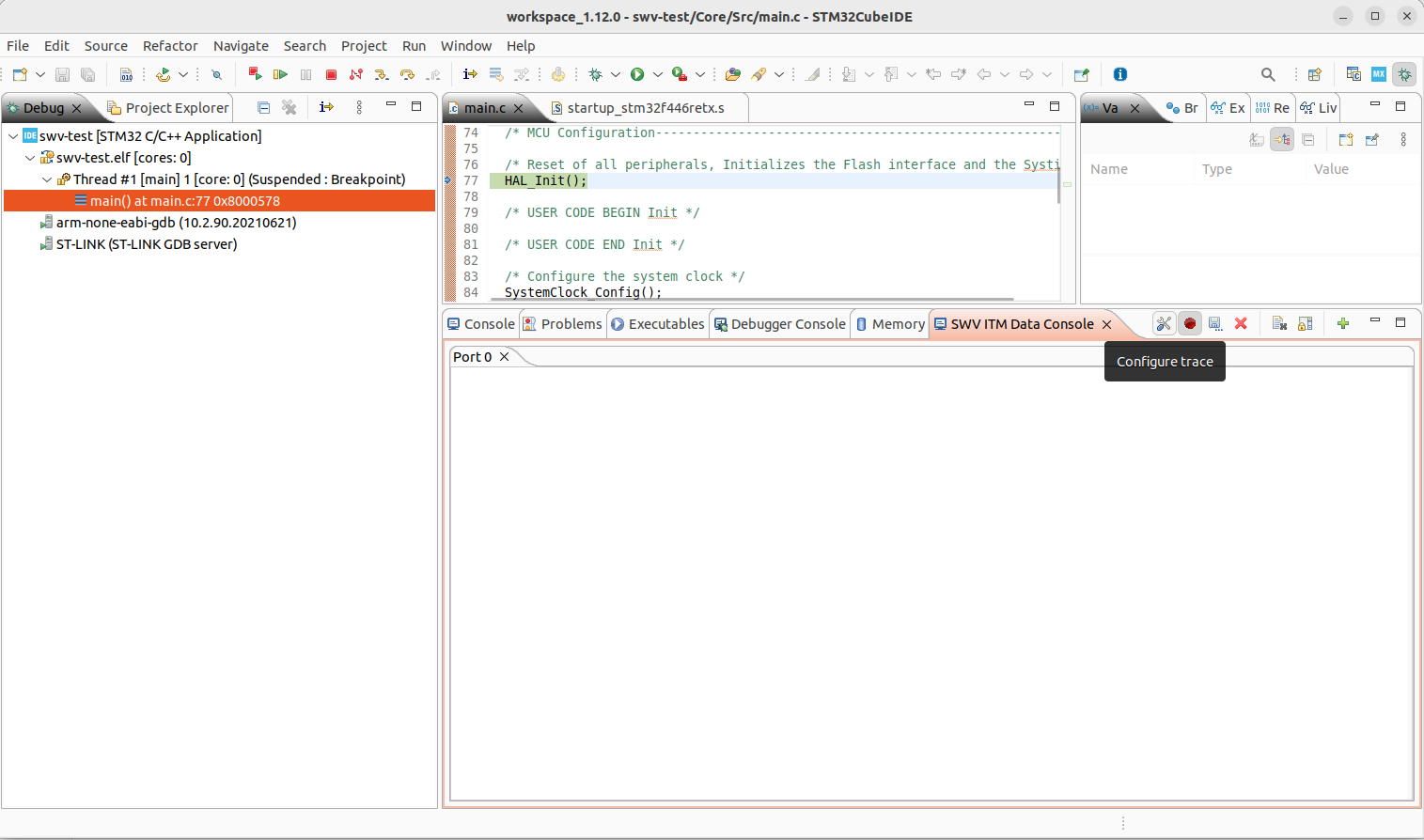
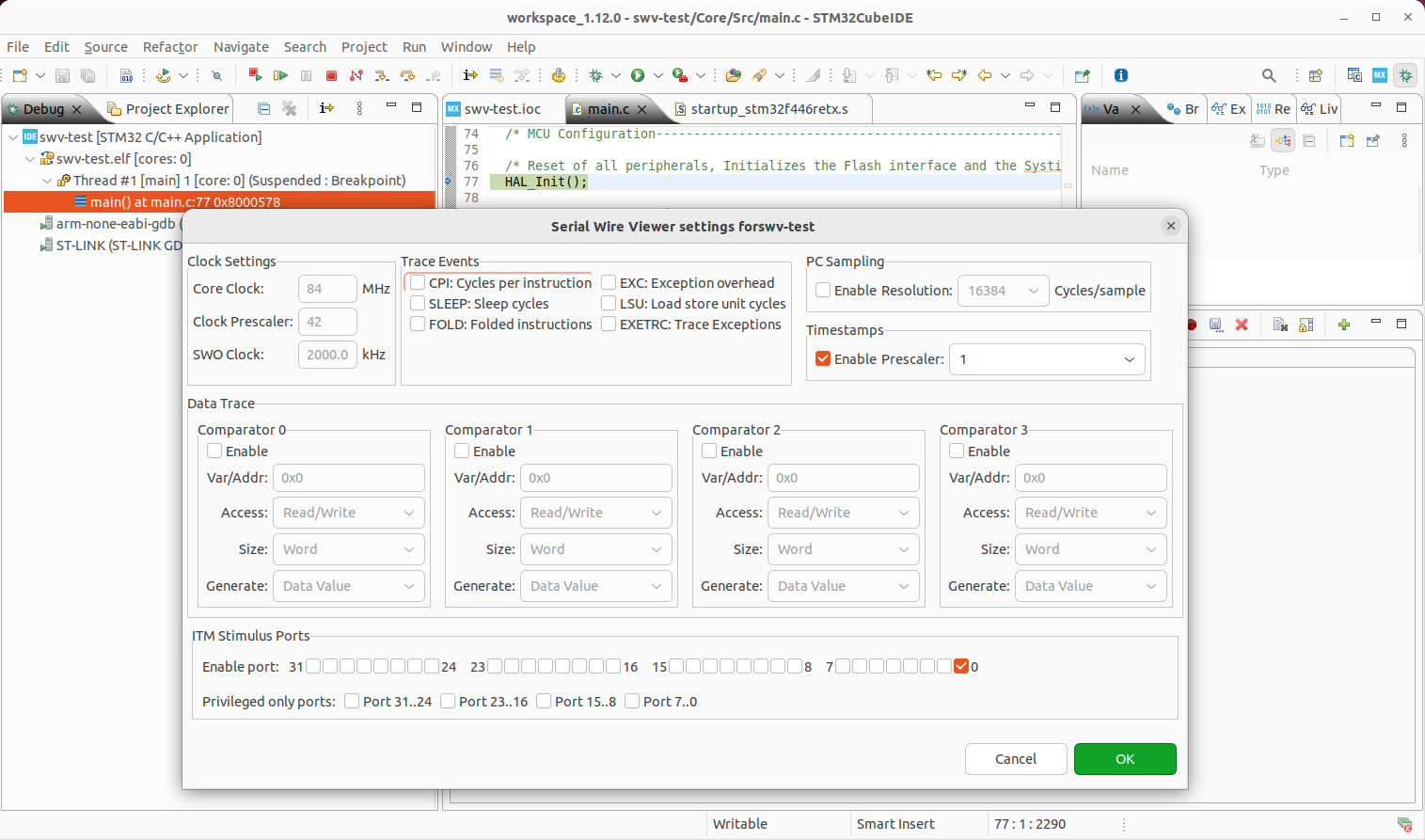
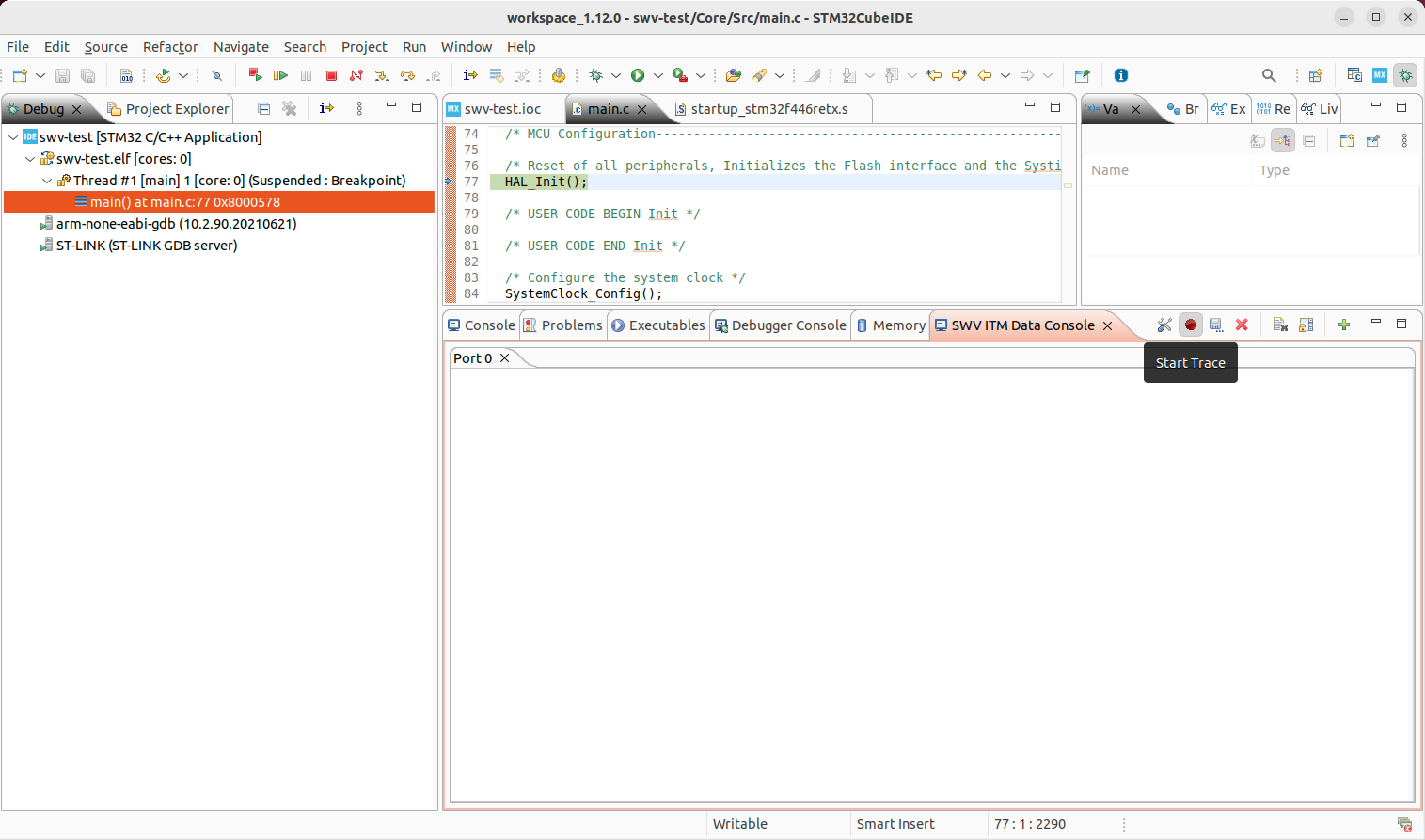
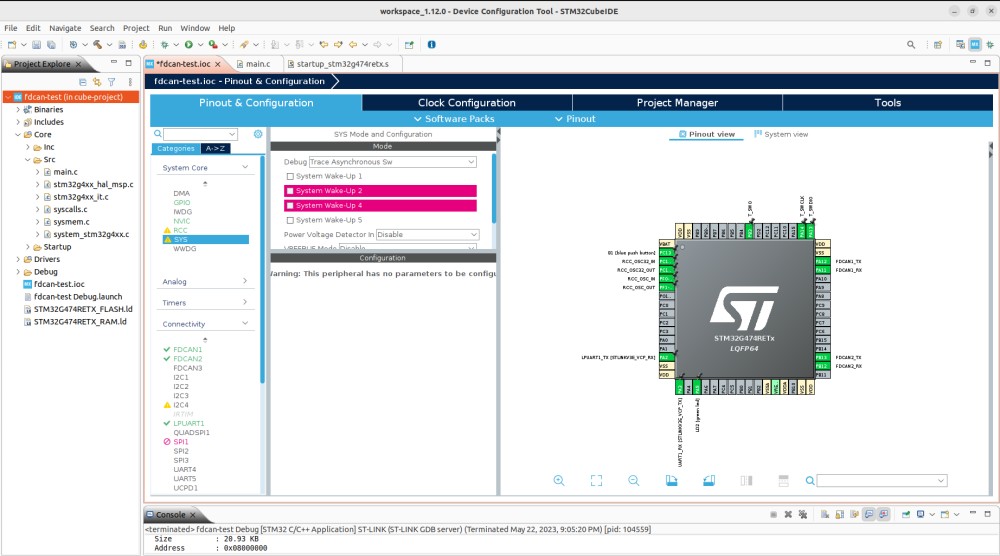
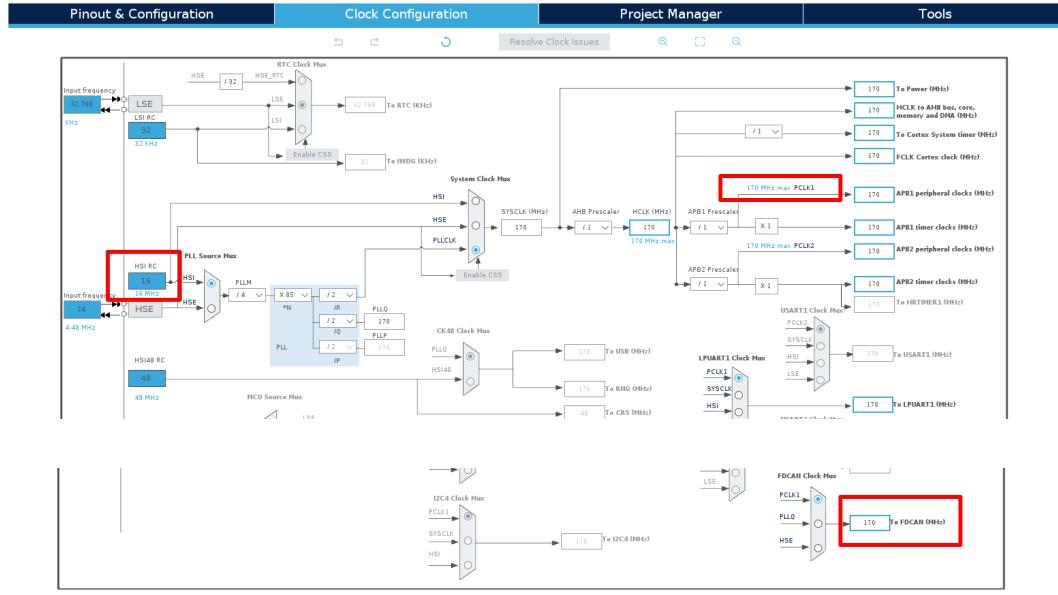
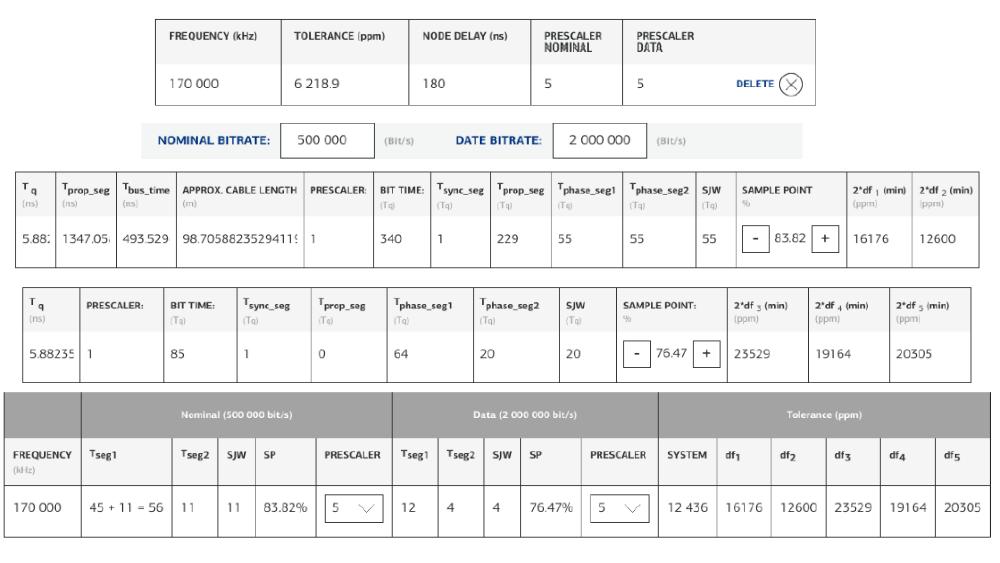
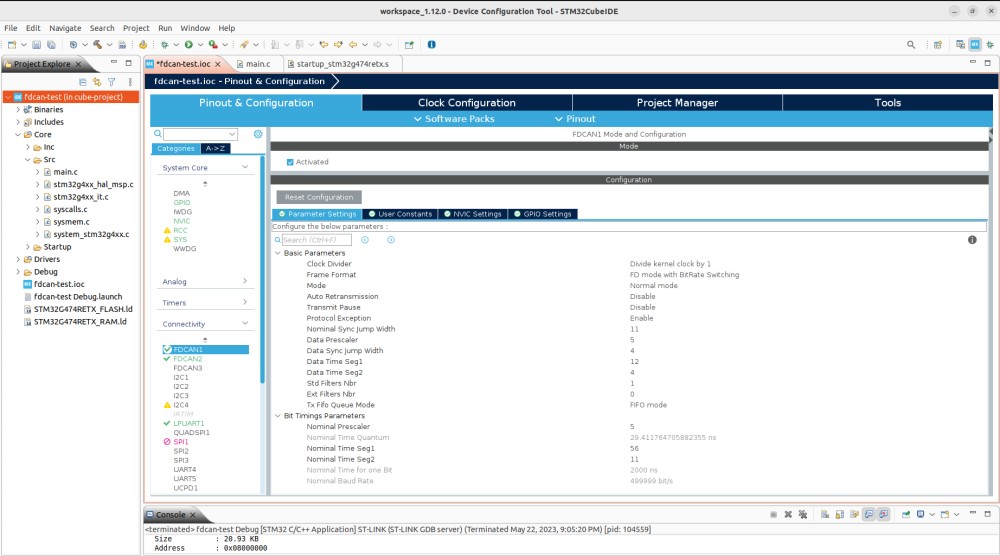
ピン、転送などハードウェアに関わる設定や、FreeRTOS、コンパイラ、リンカーに関わる設定については、参考資料2のいうとおりに設定しておく。コンパイルやリンクエラーの要因になる、とくに「絶対パス」の記述はミスないよう注意する。
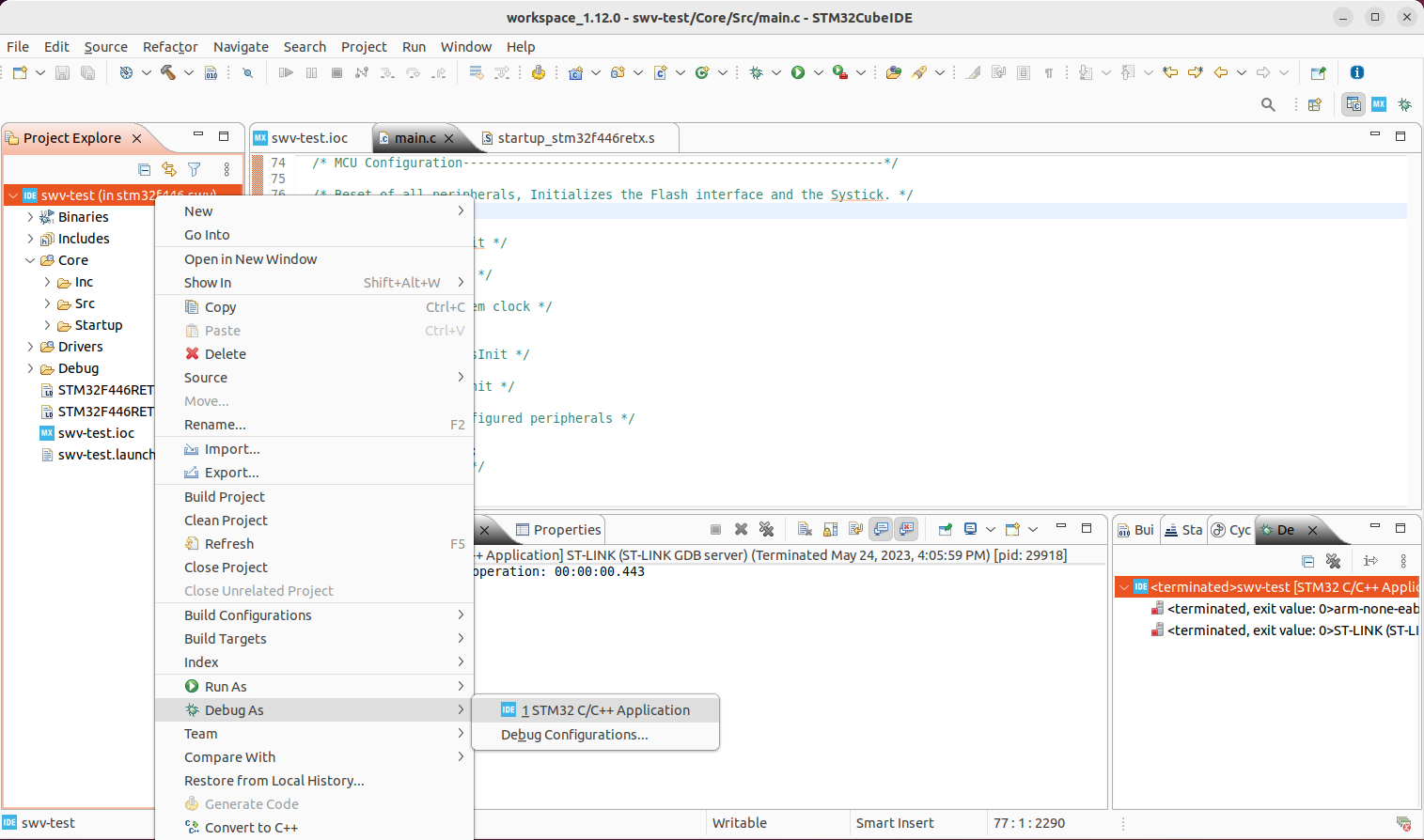
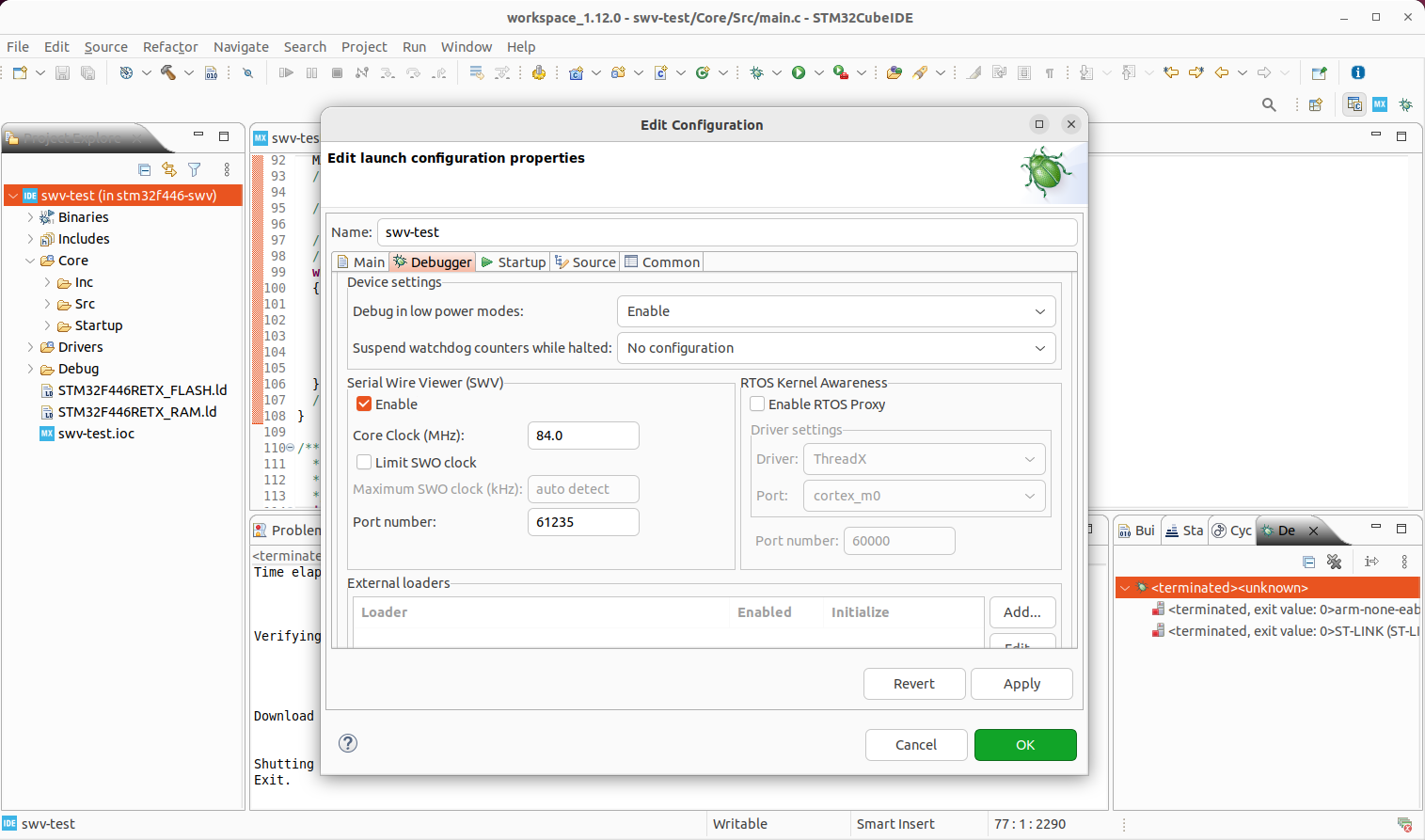
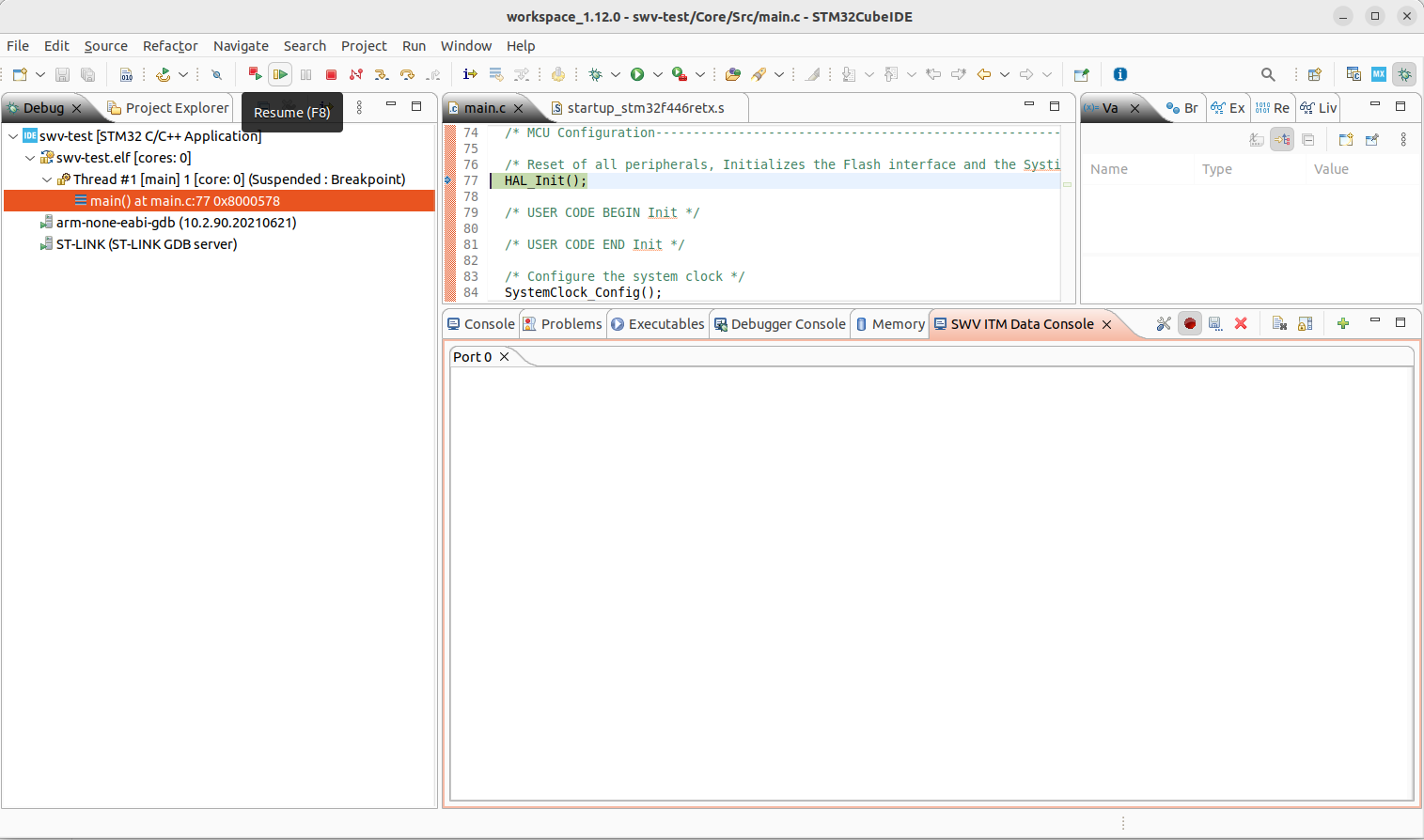
コード生成&手入れ&ビルド&ラン
micro_ros_stm32cubemx_utils/sample_main.cと、main.cと比較して、その差分をmain.cに追加する。
ビルドの際にワーニングがいくつか出たが、前向きにOKにしておく。
micro_ros_setupビルド
source /opt/ros/$ROS_DISTRO/setup.bash mkdir ~/uros_ws && cd uros_ws git clone -b $ROS_DISTRO https://github.com/micro-ROS/micro_ros_setup.git src/micro_ros_setup rosdep update && rosdep install --from-paths src --ignore-src -y colcon build source install/local_setup.bash
micro_ros_agentビルド
source ~/uros_ws/install/local_setup.sh ros2 run micro_ros_setup create_agent_ws.sh ros2 run micro_ros_setup build_agent.sh source install/local_setup.sh
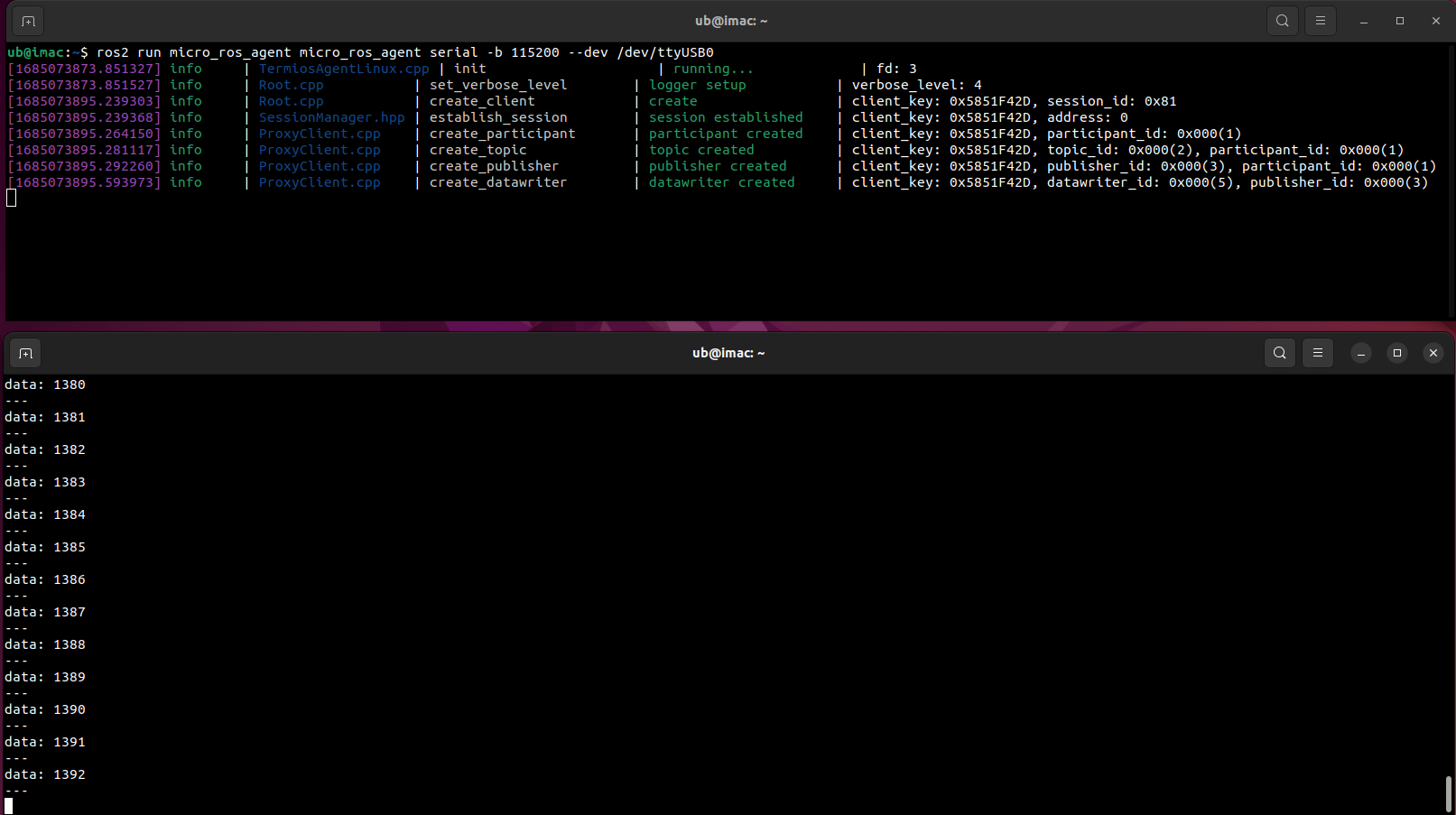
接続確認
source ~/uros_ws/install/local_setup.sh ls -l /dev/ttyUSB* sudo chmod 1666 /dev/ttyUSB0 ros2 run micro_ros_agent micro_ros_agent serial -b 115200 --dev /dev/ttyUSB0 ros2 topic list ros2 echo /cubemx_publisher
蛇足:USBポートのデバイス名は、TTL-USBコンバータはFTDI/CP(Silicon Labs)/CH(Qinheng Microelectronics)製TTL-USB IC使用の場合、/dev/ttyUSB*となり、マイコン内蔵USBコントローラ使用、つまりCDC/HIDなどのバーチャルCOMポートの場合、/dev/ttyACM*となる。
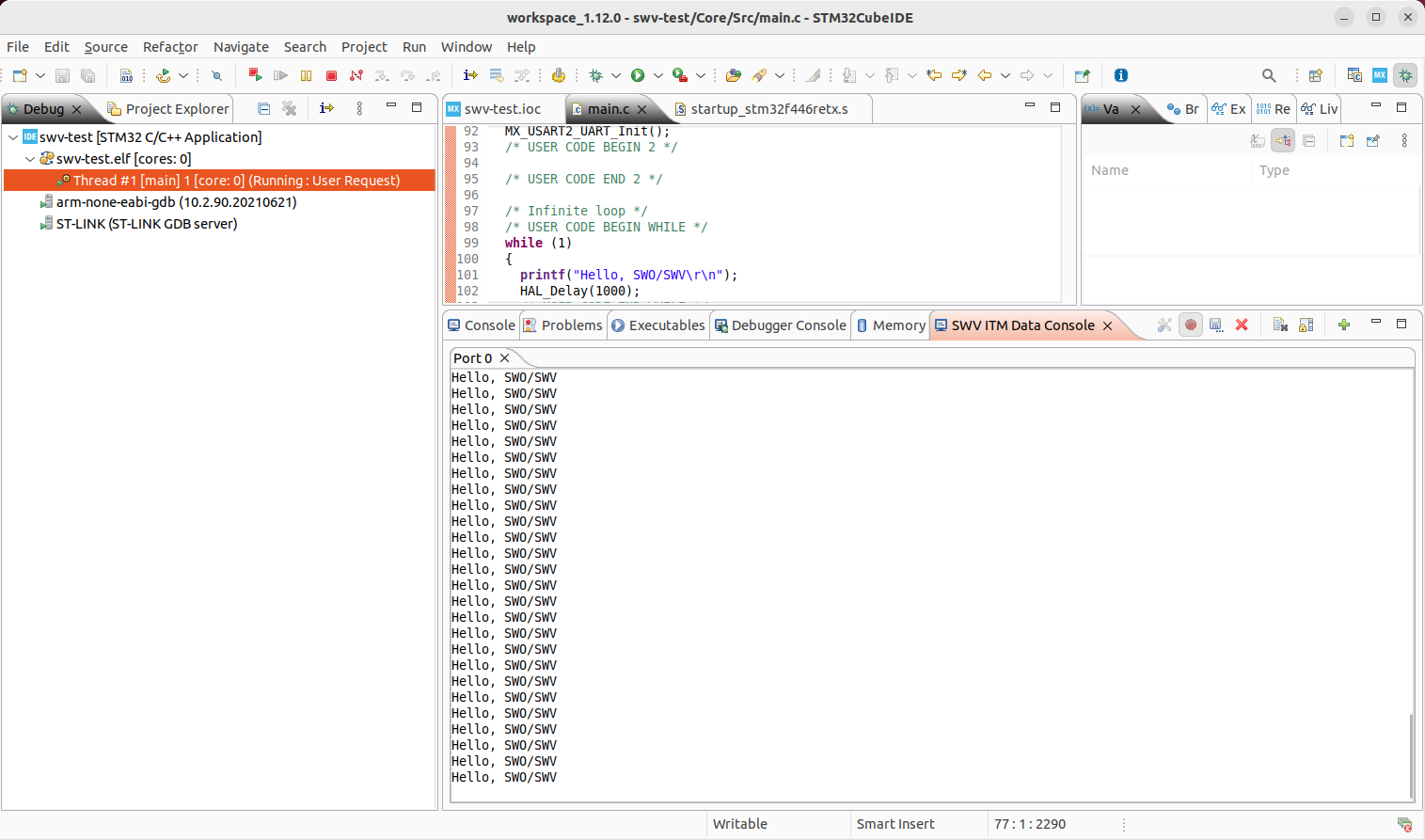
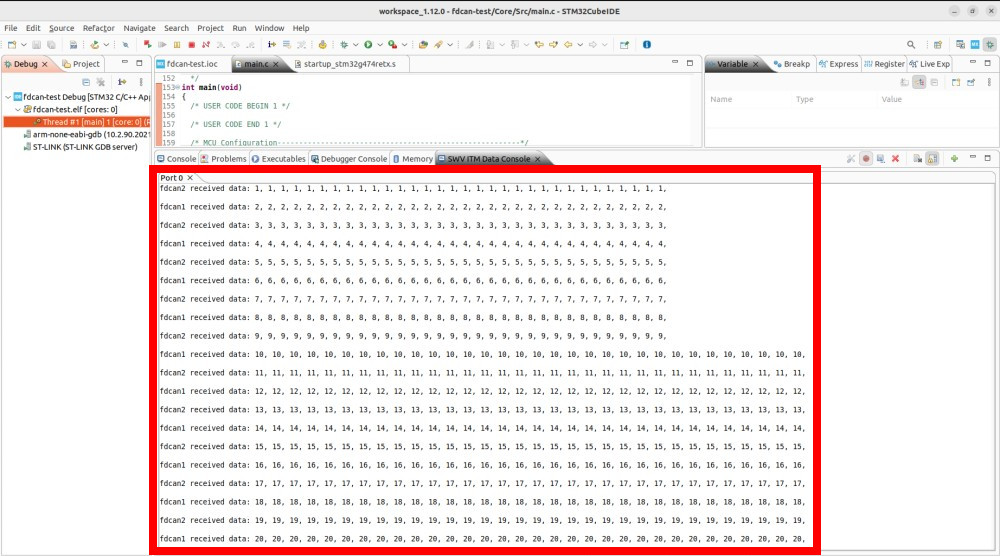
以下のような結果が出てれば、micro-ROS@STM32F446REからのメッセージは届いたら確認完了とする。
プロジェクト
STM32プロジェクトはgithub.com/soarbear(ROBOSHO)に預かっておく。
参考資料
1・https://micro.ros.org
2・https://github.com/micro-ROS/micro_ros_setup
3・https://github.com/micro-ROS/micro_ros_stm32cubemx_utils
あとがき
micro-ROSは、設計要件次第、クロック周波数100〜200MHzのSTM32F4、STM32G4にも有用&可用であることが分かった。Docker、Micro XRCE-DDSは、ROS2とは少し違和感が感じさせられて、これからドンドン進化していくと思われる。
ロボット・ドローン部品お探しなら![]()