uArm Swiftは、uFactory社が開発したオープンソースロボットアームの2代目です。
主な特長
・オフライン学習モード(手で動きを教える)、uArm Studio(PCソフト)、uArm Play(スマホアプリ)の3つの操作方法
・開発用にuArm Creator Studio(UCS)にて、Pythonによる精密な制御プログラミングできる
・Seeed Groveセンサモジュール、Openmv camが接続可能なソケット内蔵、機能拡張できる
・ペイロード500クラム、繰り返し精度(モータ)0.2mm(理想値)
・オープンソース利用、ROS(ロボットOS)/UCS(Python開発環境)
・製品形態は、大まかにuArm Swift(廉価バージョン)とuArm Swift Pro(上位バージョン)に分けられます。違いはモータの品種です。uArm Swiftは廉価のサーボを使っているに対して、uArm Swift Proはステッピングモータを使っています。比較は以下のとおりです。
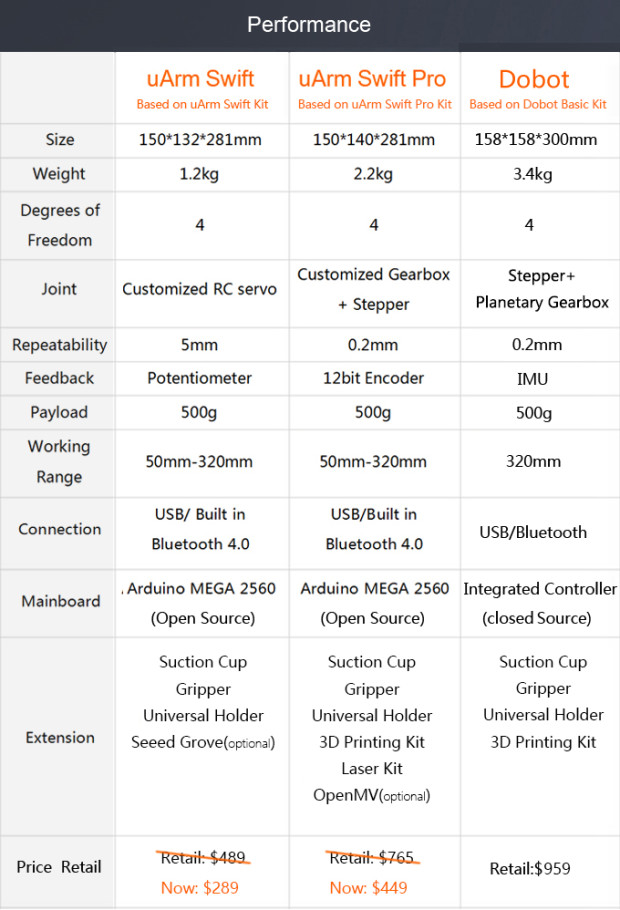
・注:価格は、クラウドファンディングの際の激安価格です。
・uArm Swift Pro(上位バージョン)には、さらにuArm Swift Pro Baisc Kitと、uArm Swift Pro Super Kitがあります。差分はOpenmv camモジュールです。
2017年3月までクラウドファンディング用アピールビデオ
uArm Swift Pro Basic Kit
●uArm Swift Pro 本体 x 1
●Bluetooth モジュール x 1
●ユニバーサルホルダー x 1
●グリッパ x 1
●レーザ刻印モジュール x 1
●3D プリンタモジュール x 1
uArm Swift Pro Basic Kit ロボットアームキットから販売しています。
uArm Swift Pro Super Kit
●uArm Swift Pro 本体 x 1
●Bluetooth モジュール x 1
●ユニバーサルホルダー x 1
●グリッパ x 1
●レーザ刻印モジュール x 1
●3D プリンタモジュール x 1
●Openmv camモジュール x 1
以上
ロボット・ドローン部品お探しなら![]()