
はじめに
DCモータに対する、PID制御とは、制御量(本文では減速機出力シャフトの回転速度、角速度といい)と、目標値(本文ではターゲット回転速度、目標角速度といい)の差分(本文ではエラーといい)を無くすための操作量(PWMパルス出力)に関わる、P(比例)制御、I(積分)制御、D(微分)制御をかけるとのこと。ロータリエンコーダは回転速度を安易に計算可能な要素(A相/B相パルス)を提供する、常用デバイスとして利用される。本実験の趣旨としては、回転速度の計算ベースとなる、エンコーダのA/B相パルスは正しく計測されたかどうか、またPID制御の精度、確度を評価するに当たって、他のデバイス、本実験ではhaya_imu(ICM-42688、MMC5983MA内蔵)を活用して評価すること。
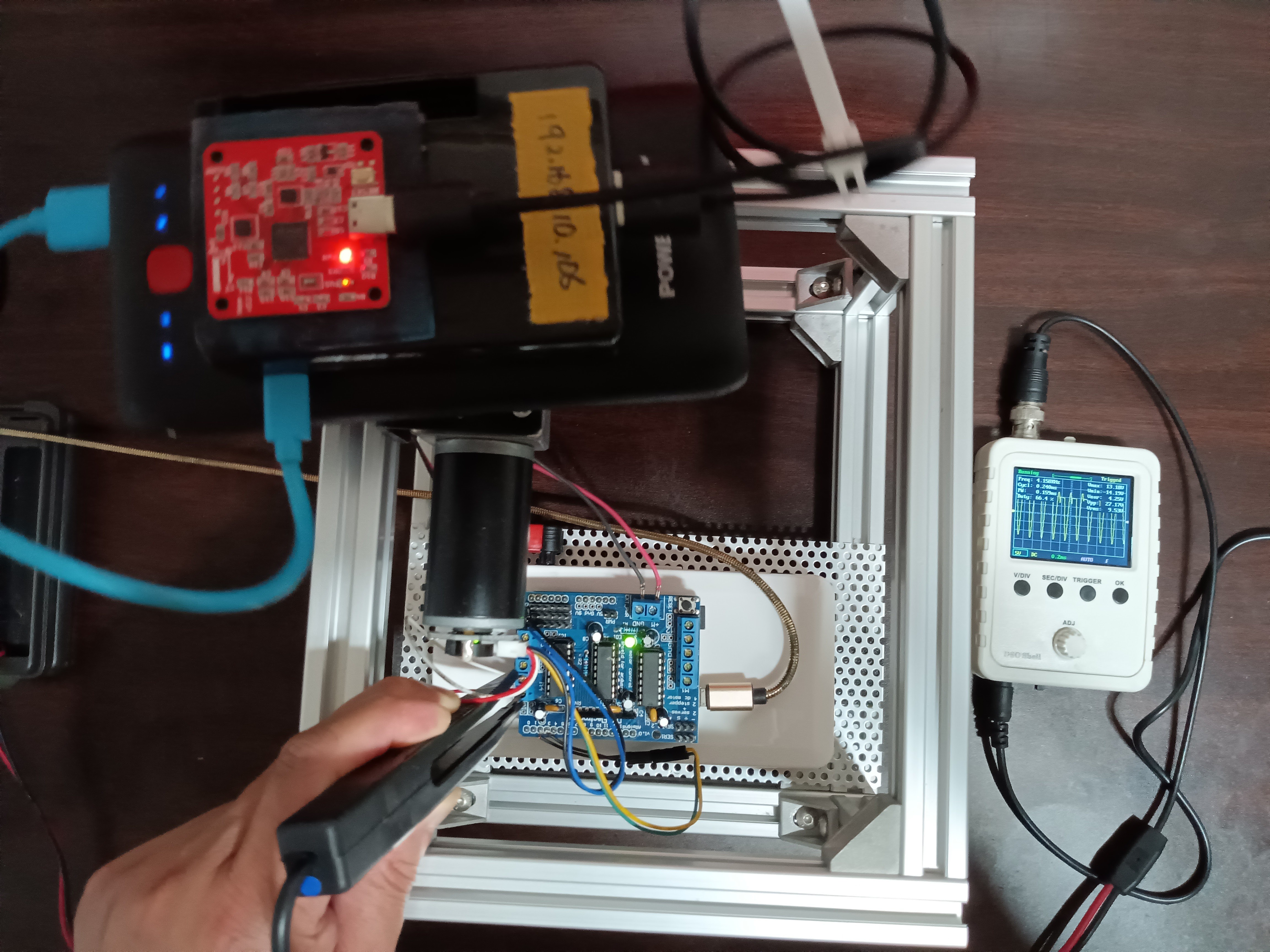
実験環境
●12V入力DCブラシモータ
●12V出力DC電源(Motor Shieldへ給電)
●磁気式エンコーダ
●Arduino Leonardo正規品基板
●Adafruit Motor Shield v1.2互換基板(ライブラリ修正あり、Timer3A/D5-pin/PWM周波数を4KHzへ変更済み)
●9軸センサhaya_imu v3.2
●Raspberry Pi 3 Model-B(ROS Slave、Unbuntu20.04/Noetic、haya_imuへ接続)
●5V出力DC電源(Raspberry Piへ給電)
●Lenovo L560(ROS Master、Unbuntu18.04/Melodic、Arduino Leonardoへ接続)
開発要素
ROSパッケージ
以下ROSパッケージ、ROSカスタムメッセージまたはライブラリをインストールして、catkin_makeしておく。
rosserial haya_motor_ros haya_imu_ros ros_lib by rosserail_arduino with Arduino IDE Adafruit-Motor-Shield-library-leonardo arduino_node(ino) on Leonardo with Arduino IDE
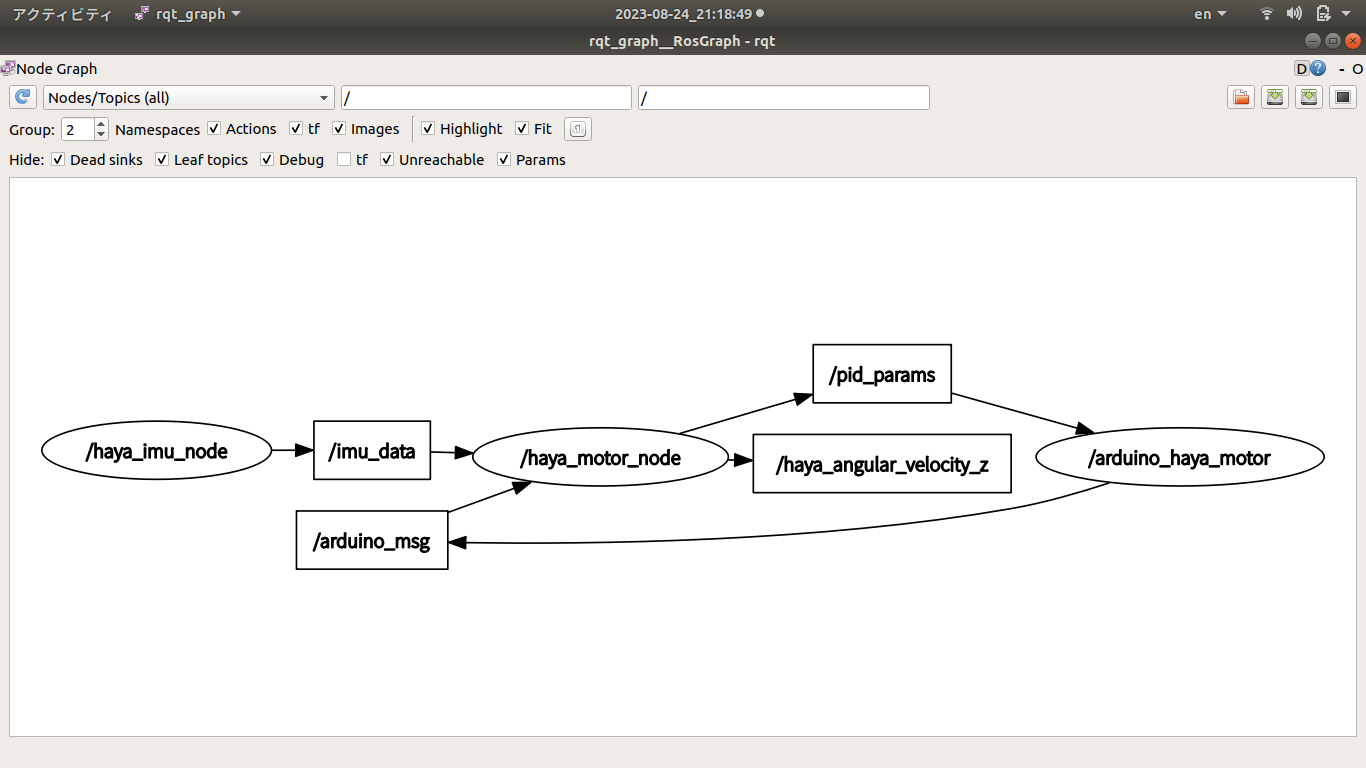
ROSノード
/arduino_haya_motor /haya_imu_node /haya_motor_node /rosout /rqt_plot
ROSトピック
/arduino_msg /diagnostics /haya_angular_velocity_z /imu_data /pid_params /rosout /rosout_agg
ROSカスタムメッセージ
haya_imu_ros/ImuData haya_motor_ros/ArduinoMsgs haya_motor_ros/PidMsgs
ROSノードの相互作用状況
Arduinoノード
エンコーダA相パルス割込みハンドラ
if (digitalRead(ENCODER_A) != digitalRead(ENCODER_B)) {
current_counter++;
}
else {
current_counter--;
}
エンコーダB相パルス割込みハンドラ
if (digitalRead(ENCODER_A) == digitalRead(ENCODER_B)) {
current_counter++;
}
else {
current_counter--;
}
エンコーダカウンタによる回転速度
// Run the PID loop at 100 times per second #define PID_RATE_HZ 10 // 10Hz // Convert the rate into an interval #define PID_INTERVAL_MS (1000 / PID_RATE_HZ) // 10ms #define PID_INTERVAL_S (float)(1.0 / PID_RATE_HZ) // 0.1s #define PPR 12 // Encoder pulse / round #define COUNTER_FACTOR 4 // 1*encoder-pulse = 4*counter #define REDUCTION_RATIO 100 // Gear reduction ratio #define CPR (PPR * COUNTER_FACTOR * REDUCTION_RATIO) // Counters of encoder / round current_velocity = (current_counter - previous_counter) * 360.0 / (CPR * PID_INTERVAL_S);
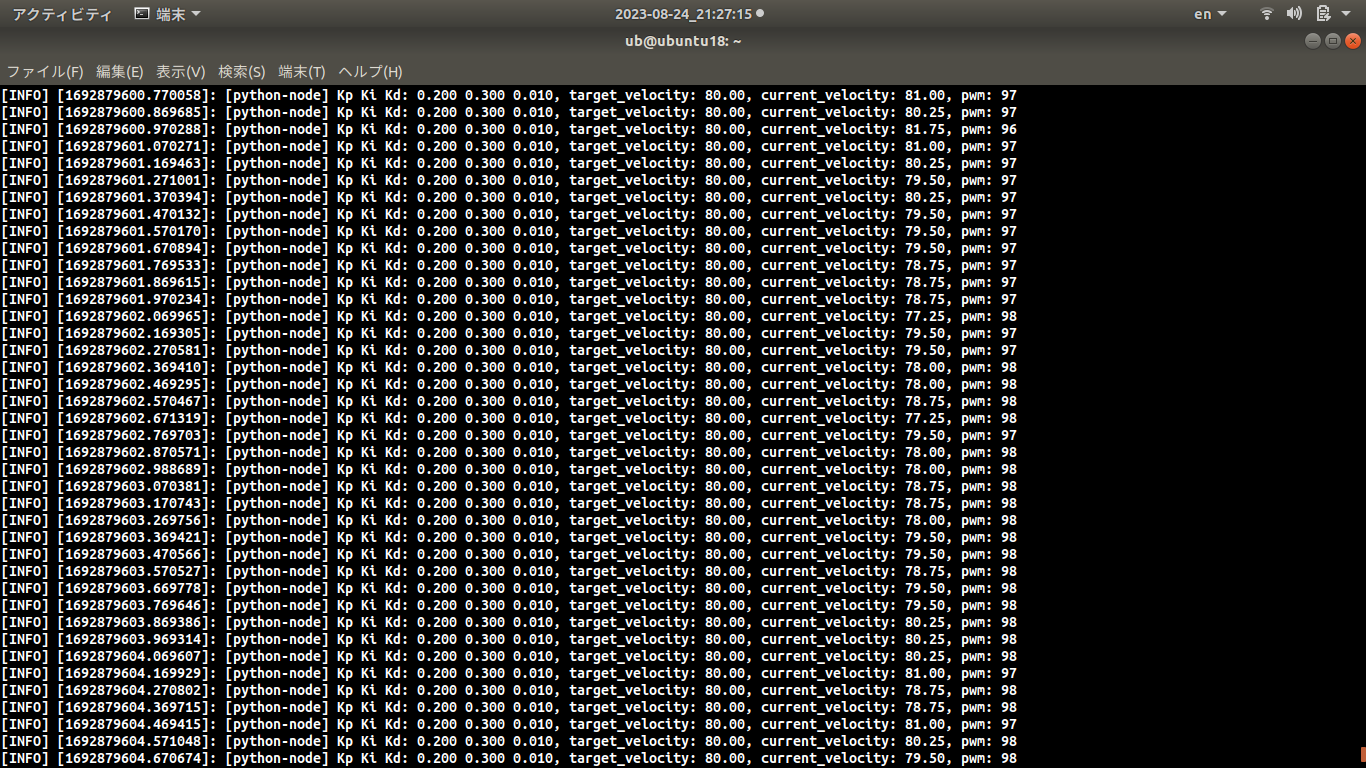
PID係数
本実験環境で何回も実験を繰り返して、納得いくPID係数Kp、Ki、Kdを決めておく。
PID操作量
●Position法
error = target_velocity - current_velocity; integral += error * PID_INTERVAL_S; differential = (error - previous_error) / PID_INTERVAL_S; previous_error = error; pwm = (int32_t)(Kp * error + Ki * integral + Kd * differential);
●Increment法
error = target_velocity - current_velocity; proportion = Kp * (error - previous_error); integral = Ki * error * PID_INTERVAL_S; differential = Kd * (error - 2 * previous_error + previous_error2) / PID_INTERVAL_S; pwm += (int32_t)(proportion + integral + differential); previous_error2 = previous_error; previous_error = error;
実験手順
Run roscore
Run roscore@ROS Master
roscore
Launch haya_imu_node
Launch haya_imu_node@ROS Slave
roslaunch haya_imu_ros haya_imu.launch
Launch haya_motor_node
Launch haya_motor_node@ROS Master
roslaunch haya_motor_ros haya_motor.launch
結果確認
PID制御の目標値、制御量
以下のデータを表示させて、エンコーダ、IMUからのカウンタによる回転速度を確かめて、PID係数Kp、Ki、Kdを決めてまた、エンコーダまたは、PID制御を評価する。PWM周波数をデフォルトの490Hzから4KHzに変更することで回転速度の分散は小さくなっている。これは490Hzより4KHz周波数のほうはモータにブレーキをかけずにPWM波形は滑らかになって果たしてモータ出力シャフトの回転速度も滑らかになったわけである。
/haya_angular_velocity_z /pid_params/target_velocity /arduino_msg/current_velocity
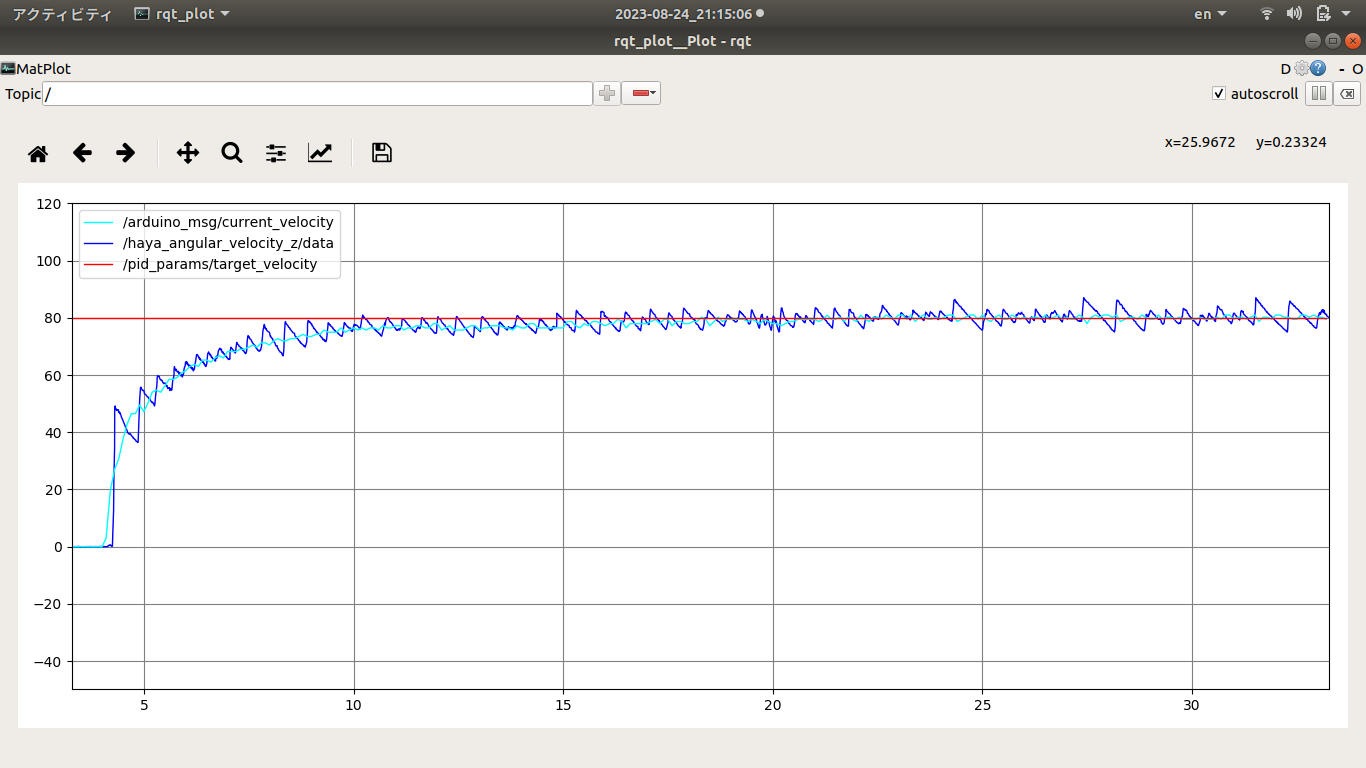
haya_imuで測った回転速度が、エンコーダによる回転速度より分散が大きくなって、これは測定法および測定ポジションは違って、またモータシャフトによる振動や、慣性力に由来するものと考えられる。
PID制御の目標値、制御量、操作量
PID制御の目標値、PWM操作量、エンコーダによる回転速度
PID制御の操作量PWM波形
オシロスコープは測った操作量PWMの波形、モータコイルに起因する逆起電力による、コイルサージは約-14Vあったと、モータシールド実装モータドライバL293Dにコイルサージ(逆起電流)を流すダイオードが効いていると考えられる。ないと一瞬-12Vの数十倍~-1千万V(無限大)に達する可能性ある。これで回路で繋がっているデジタルICを一発でぶち壊すことになる。

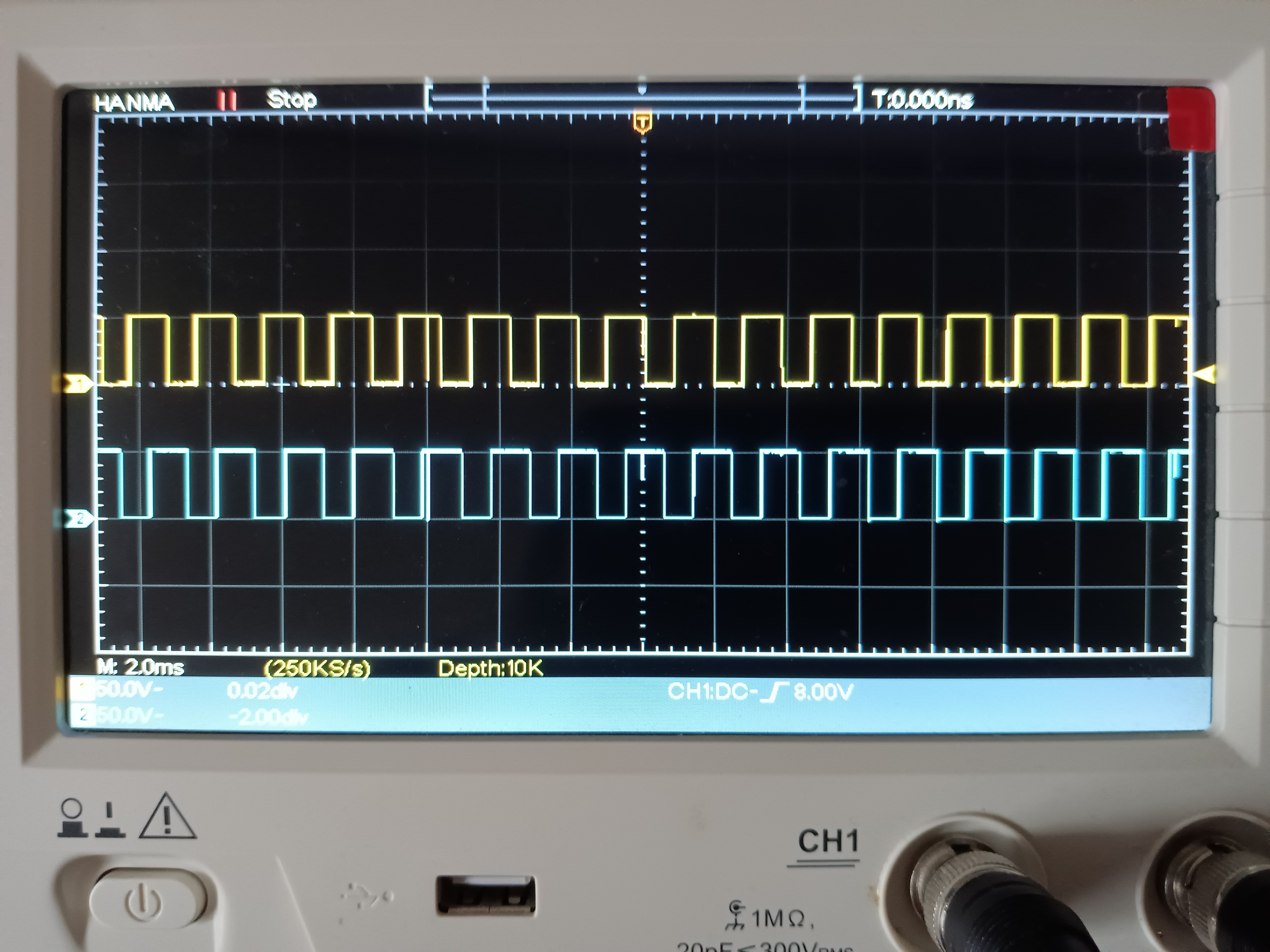
エンコーダ出力パルス波形
約1/10の確率でノイズに起因するスパイクが起きるらしいので、MCUにノイズフィルタ実装の入力PINは望ましい。
リポジトリ
haya_motor_ros、arduino_node、修正ありMotor Shieldライブラリ含むリポジトリは、https://github.com/soarbear/haya_motor_ros に公開済み(BSD 3-Clause License)
最後に
IMUはモータシャフトでなくロボット本体に装着した場合、エンコーダのみならずLidar、カメラ、GPS他のセンサーとフュージョンする場合多い。
参考記事
●ロータリエンコーダによる速度計算
●9軸センサーICM-42688+MMC5983 6軸&9軸回転ベクトル&3軸オイラー角 MAX1000Hz同時出力 ROS/ROS2対応 USB接続
ロボット・ドローン部品お探しなら![]()
