はじめに
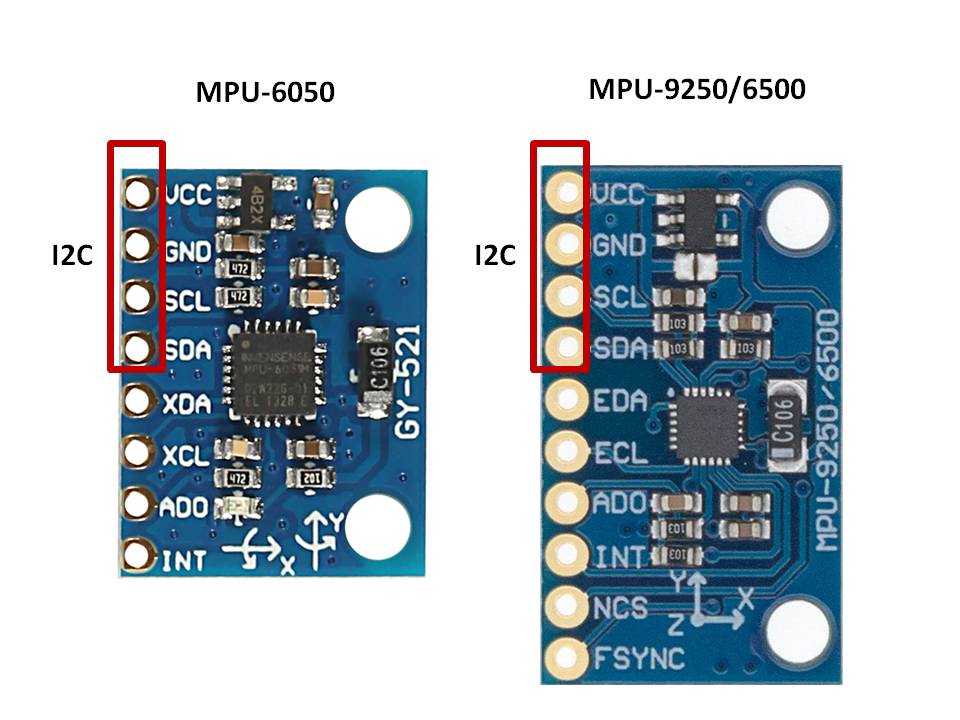
TDK Invensense製9軸IMUのICM-20948は、MPU-9250の後継機種で、MPU-9250のVDDは2.4V~3.6V、VDDIOは1.71V~VDDに対して、ICM-20948のVDDは1.71V~3.6V、VDDIOは1.71V~1.95Vに低めに設定して、省電力となった。また、デジタルモーションプロセッサDMP(ICM-20948内蔵FPGA)によるデータフュージョン(FPGAによるFusion)の特長が継承して、さらにRAM容量が拡張して、6軸フュージョンのみならず9軸フュージョンまで増強して、較正機能もあると、以下参考文献を読むと詳細まで分かる。
環境
・Ubuntu 18.04
・ROS Melodic
・MCU: Cortex M0+
・IMU: ICM-20948
DMP3の出力確認
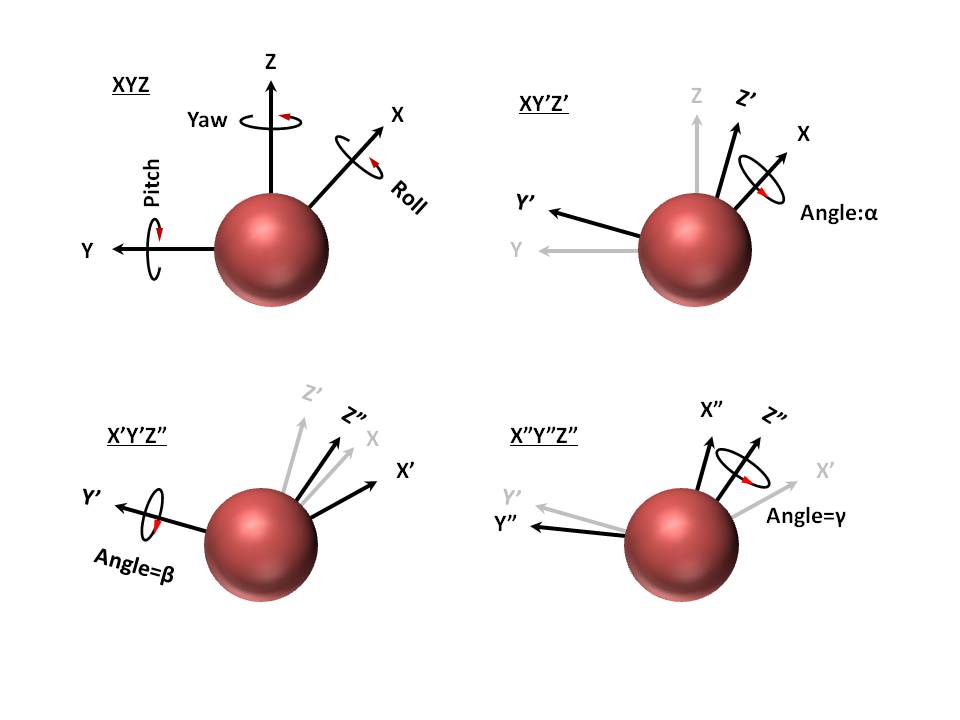
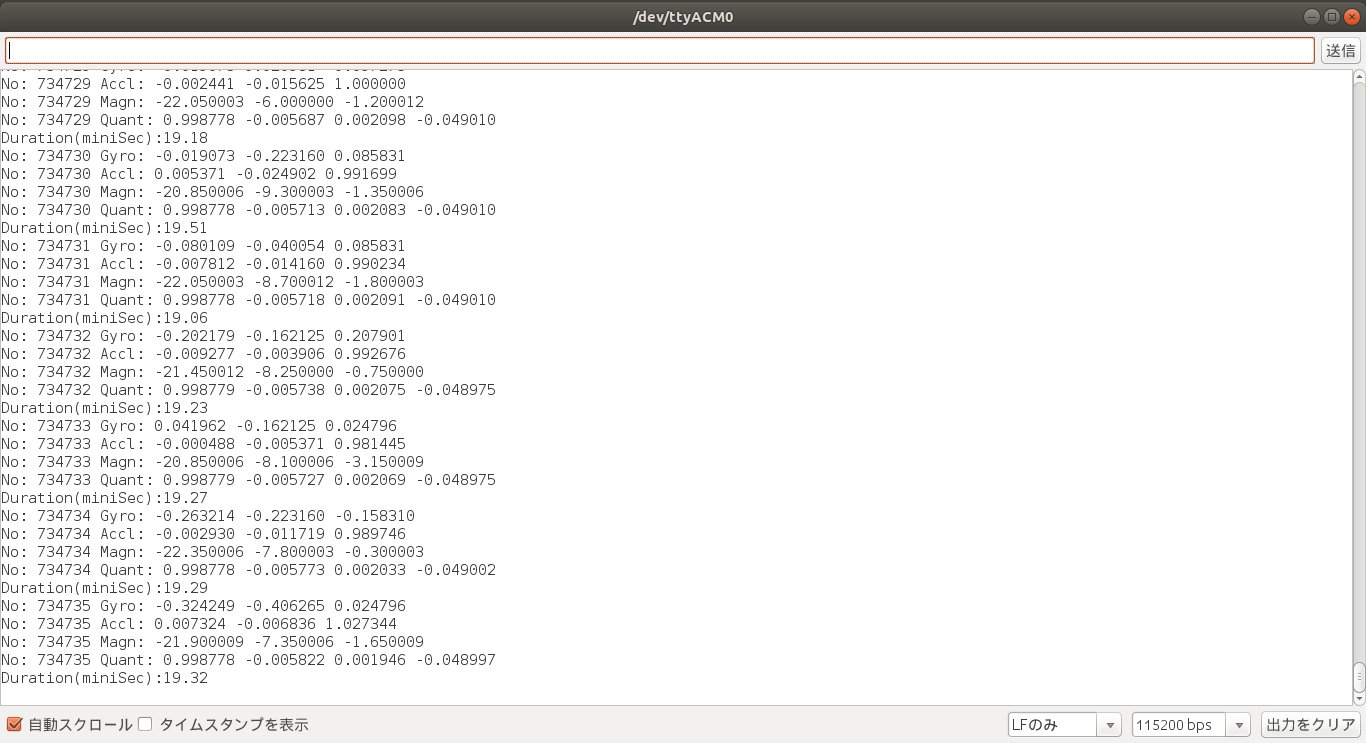
以下のように、出力レート50Hz、加速度Ax Ay Az、角速度Gx Gy Gz、磁場Mx My Mz、4元数Qw Qx Qy Qzの順に出力させる。
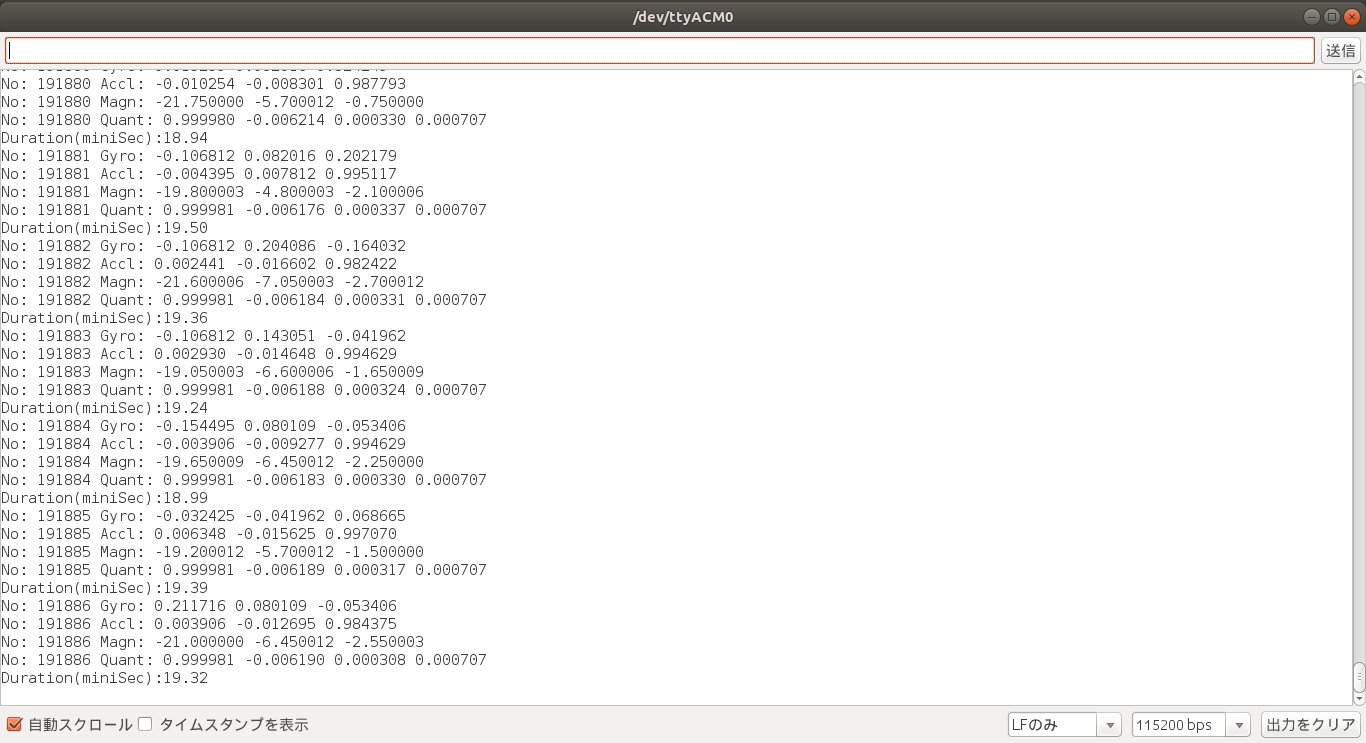
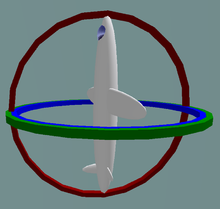
4時間+にわたる連続動作して出力を確かめる。確認環境は完全に静止な状態でもないので、ドリフトは納得いく範囲内にとどまっている。rvizで確かめてもドリフトが肉眼では見えないほど。ドリフトにおいては、MPU-9250から大いに改善されたと見られる。
出力確認動画は以下イメージをクリックすると、youtubeへジャンプする。
最後に
MPUシリーズと比べて、ユーザの事前校正いらず、長時間(実験は4時間程度まで)においても、ドリフトとくにヨウ角(Yaw、方向角)のドリフトは目立たないほどになった。また、1.71Vの低電圧でも動作可能なのでスマートデバイスや、ロボットの長時間電池駆動が可能になる。なお、出力レートはMax 225Hzと確認できた。ICM-20948 DMP3(IMU内蔵FPGA)から出力した、Accel/Gyro/Mag計9軸データ出力にFusion Quaternionの4元数データがそのまま利用可能で、遅延もソフト・カルマンフィルタなどより少なく他機種IMUより優れる(低遅延、6軸/9軸フュージョンデータ出力レート225Hz)ため、ロボットの精度向上に利用可能。1.8V VDDIO対応、DMP3の出力に手間かかった末、地磁気センサ出力は75Hzまでと少し残念だが、総じて優秀としか思わないICM-20948をロボット装置に組み込もうと決めた。
商品化モジュール
ICM-20948とCoretex M0+を組み込んだ回路を設計して、ROSに対応したロボット専用センサモジュールとして商品化して、2021年1月~、リリースと予定している。この商品は皆さんの学術研究にお役に立てるようと願う。主な仕様は以下のとおり。
・構成 CortexM0+ & TDK Invensense ICM-20948(9軸)実装
・接続 USB Type-Cコネクタ実装
・出力 6軸/9軸融合4元数はFPGA on chipから低遅延で出力、別途ソフトでフュージョン必要なし、出力レート225Hz、同時に加速度(アクセル)3軸データ225Hz、角速度(ジャイロ)3軸データ225Hz、地磁気(コンパス)3軸データ75Hzまで出力可能
・ROSパッケージ、Githubへ公開、ROS Kinetic以降対応、ROS TopicへSubscribeすることでデータが受け取り可能
・rviz実演、実演ビデオあり
【2021年3月いま現在】1回目制作分(評価版)、大学など研究機関へ無料配布中(アンケート調査あり)、WEBでの募集を含めて順次終了。
【2021年4~5月予定】2回目制作分(商用版)、販売の予定。
詳細情報
9軸IMUセンサ 6軸/9軸フュージョン 低遅延 USB出力 補正済み ROS対応
取扱店舗
9軸IMUセンサ 6軸/9軸フュージョン 低遅延 USB出力 ROS対応 | ROBOT翔
参考文献
Migrating from MPU-9250 to ICM-20948-InvenSense
関連記事
9軸IMUセンサ MPU-9250をロボットに組み込もう
6軸IMUセンサ MPU-6050をロボットに組み込もう
ロボット・ドローン部品お探しなら![]()